8.9. EXTENSION OF COMBINED COMPENSATOR DESIGN INCLUDING A CONTROLLER AND AN ESTIMATOR FOR SYSTEMS CONTAINING A REFERENCE INPUT
How can we extend the concepts developed in the previous section for regulator design, shown in Figure 8.19 (where the reference input r(t) = 0), to the more general problem where the reference input exists? Several methods exist which can be used to design such a system [8,9]. This section will consider the configuration illustrated in Figure 8.22. The design goal of the approach to be presented is to have the state-estimation error ![]() (t) be independent of the reference input r(t) (e.g.,
(t) be independent of the reference input r(t) (e.g., ![]() should be uncontrollable from r(t)). This is a very important consideration, as we do not want the state-estimation error to be dependent on the type and level of the input.
should be uncontrollable from r(t)). This is a very important consideration, as we do not want the state-estimation error to be dependent on the type and level of the input.
Let us reconsider the controller equation (8.143),
![]()
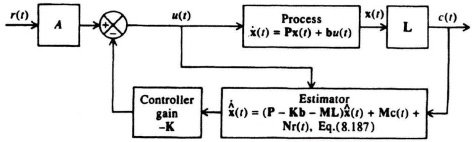
Figure 8.22 Addition of the reference input to the system shown in Figure 8.19 containing a combined controller and estimator.
and the estimator equation (8.152)
The reference input r(t) will be introduced to these equations by adding a term Ar(t) to the ...
Get Modern Control System Theory and Design, 2nd Edition now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

