8.8. COMBINED COMPENSATOR DESIGN INCLUDING A CONTROLLER AND AN ESTIMATOR FOR A REGULATOR SYSTEM
This section considers the combined compensator design of a controller and estimator for a regulator in which the reference input equals zero, and for the case where the reference input is finite. The block diagram of this regulator is shown in Figure 8.19, which combines the concepts illustrated in Figure 8.3 for the controller and Figure 8.18 for the estimator. We wish to determine in this system the effect of using the estimated state vector ![]() (t), instead of x(t) on the system dynamics [8].
(t), instead of x(t) on the system dynamics [8].
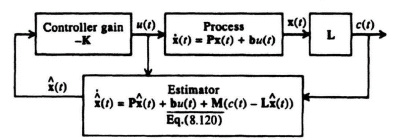
Figure 8.19 Regulator system (where the reference input r = 0) containing combined controller and estimator.
Let us consider the effect of driving the controller with ![]() (t) instead of x(t). From the process dynamics shown in Figure 8.3,
(t) instead of x(t). From the process dynamics shown in Figure 8.3,
![]()
From Figure 8.19, we also know that
![]()
Therefore, substituting Eq (8.143) into Eq (8.142), we obtain
In terms of the state estimation error (t) defined in Eq (8.122), Eq ...
Get Modern Control System Theory and Design, 2nd Edition now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

