9.9 DISTRIBUTED BOUNDARY COVERAGE BY ROBOTS
The distributed boundary coverage was studied by Correll et al. (2006) and Correll and Martinoli (2007a). They described self-organized embedded sensor/actuator networks for “smart” turbines. Robots are utilized to cover every point on the boundaries of all objects in an environment. The work is motivated by the inspection of the blades in the compressor section of a jet turbine. The process is currently performed by using borescopes, which is time consuming and costly. The narrow structure of the turbine motivates the use of extremely miniaturized robots. A swarm of miniature robots performs boundary coverage of blades in a jet turbine mock-up. The robots exploit the regularity of the environment and construct a spanning tree with the blades as vertices (Fig. 9.8). Edge traversal is achieved by a combination of dead-reckoning and navigation along way-points on a blade's boundary. Way-points can be determined by on-board sensors, which are able to detect a blade's tips and to measure the curvature of the blade.
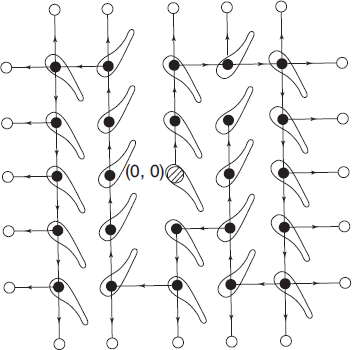
Figure 9.8 A 5 × 5 blade environment.
The spanning tree is explored by using depth first search (DFS) from the specified root. Edges are randomly selected from the unexplored candidates. An edge is said to be explored if two end points have been visited. If all edges of a node are explored, DFS returns to the parent of this node ...
Get Wireless Sensor and Actuator Networks: Algorithms and Protocols for Scalable Coordination and Data Communication now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

