8.2 CLASSIFICATION OF LOCATION SERVICES
Several classification methods have been proposed for existing location service algorithms in Stojmenovic (2002b), Camp et al. (2002), and Das et al. (2007). Here, in this chapter, we shall present a classification as a modification of Das et al. (2007). As depicted in Figure 8.1, at its top level are three classes, flooding-based, quorum-based, and home-based, each with two subclasses at the second level.
8.2.1 Flooding-Based Approach
This approach relies on flooding, which usually involves all or large portion of nodes in the network, for location update and actuator search. It can be further divided into two subclasses: proactive and reactive.
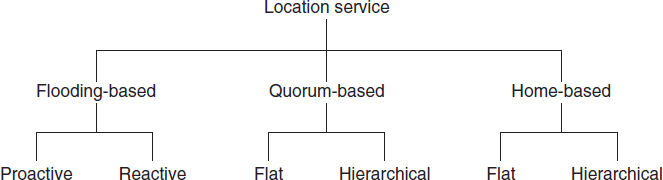
Figure 8.1 Classification of location services.
In proactive scheme, each actuator updates its location by flooding the network periodically or when desirable. If flooding is restricted only within some areas, actuator search will be directed to those areas, and it is sufficient that first receiver nodes in the areas respond. If the flooding area, however, covers entire network, then no actuator search is needed, as every node maintains the most recent locations of actuators simply by listening to their flooding messages.
In reactive scheme, if a sensor cannot find fresh location of a target actuator, it floods the network with a search message; currently recorded location and mobility information ...
Get Wireless Sensor and Actuator Networks: Algorithms and Protocols for Scalable Coordination and Data Communication now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

