Map the Wireless Landscape with NoCat Maps
Manage many wireless nodes with this open source mapping project.
In addition to commercial tools like Topo! and the DeLorme map software [Hack #80], there are a number of freely available mapping solutions that make use of public GIS data. While there is a huge amount of data available about the surface of our planet, most of the tools used to query and view the data are far from simple.
The NoCat Map project combines two powerful GIS programs to build a sophisticated but easy-to-use node database. It is built on MapServ (http://mapserver.gis.umn.edu /) and Grass (http://grass.itc.it/), and is available at http://maps.nocat.net/. NoCat Maps integrates the data and rendering functionality of MapServ and Grass with a simple node database, and attempts to provide useful data and visualization from the result. Users can add data for their own equipment, including latitude, longitude, altitude, and contact information. If this data isn’t known ahead of time, it can make an approximate guess from the user’s mailing address.
This data can then be queried and compared to other nodes in the database to find likely point-to-point links. You can then select a node from the database and view the likeliest links in a simple table, as shown in Figure 6-4.
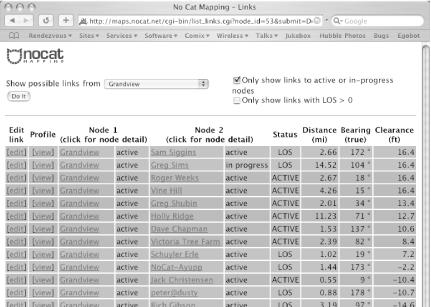
Figure 6-4. View likely point-to-point links at a glance.
Since the position of each node is known, ...
Get Wireless Hacks now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

