8.14 SYSTEM IDENTIFICATION
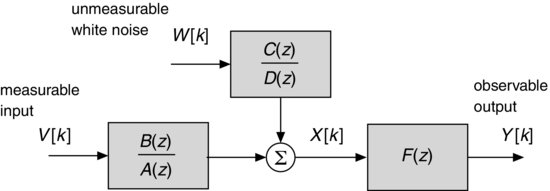
Closely related to the signal models in Section 8.13 is system identification as depicted in Figure 8.36 where we are interested in estimating an unknown system B(z)/A(z) from measurements of its output Y[k] as well as its input V[k]. The input is assumed to be measurable (whereas for the previous signal modeling techniques it is not observable), though we usually assume that V[k] is a white sequence. However, the system identification procedure is not straightforward because there is unmeasurable additive white noise W[k]. Also, the noise may be filtered by some transfer function C(z)/D(z) such that the output is nonwhite (with a nonflat PSD). It may be necessary to estimate not only B(z)/A(z) but also C(z)/D(z). Moreover, the output of the summation shown in the figure may be processed further by an unknown filter F(z) such that X[k] is not directly observable. Various algorithms have been developed for identifying the filter components depending on which (if any) of the polynomials are 1. The simplest case occurs when A(z) = C(z) = D(z) = F(z) = 1 so that only B(z) needs to be estimated from measurements of V[k] and X[k].
Figure 8.36 General system identification model.
System identification and parametric signal modeling appear to be similar techniques because the goal is to determine filter polynomials that are used to describe the measured signals. ...
Get Probability, Random Variables, and Random Processes: Theory and Signal Processing Applications now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

