3.1 Predictive Control Methods for Power Converters and Drives
Predictive control covers a very wide class of controllers that have found rather recent application in power converters. A classification for different predictive control methods is shown in Figure 3.1, as proposed in [1].
Figure 3.1 Classification of predictive control methods used in power electronics (Cortes et al., 2008 © IEEE)
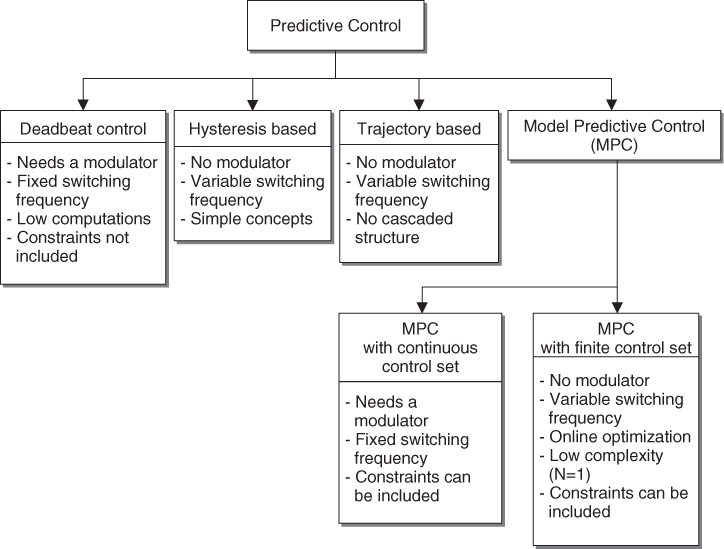
The main characteristic of predictive control is the use of a model of the system for predicting the future behavior of the controlled variables. This information is used by the controller to obtain the optimal actuation, according to a predefined optimization criterion.
The optimization criterion in hysteresis-based predictive control is to keep the controlled variable within the boundaries of a hysteresis area [2], while in trajectory-based control the variables are forced to follow a predefined trajectory [3]. In deadbeat control, the optimal actuation is the one that makes the error equal to zero in the next sampling instant [4, 5]. A more flexible criterion is used in model predictive control (MPC), expressed as a cost function to be minimized [6].
The difference between these groups of controllers is that deadbeat control and MPC with continuous control set need a modulator in order to generate the required voltage. This will result in having a fixed switching frequency. The other ...
Get Predictive Control of Power Converters and Electrical Drives now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

