5.6 STATE SPACE MODEL FOR SINGLE AREA
Let U = ∆PC be the state created by the linear combination of all our system state variables (x). We define the state with the block diagram shown in Fig 5.10.
x1 = ∫ Δf1dt U = ΔPC.
x2 = Δf d = ΔPD
x3 = ΔPG(s)
x4 = ΔPsg (Speed governer)
From Block (1)
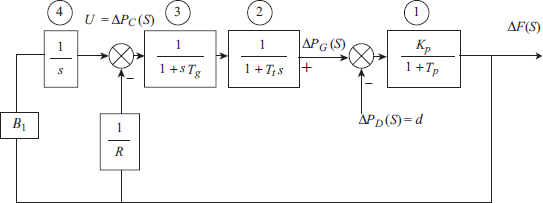
Fig 5.10 Single area state space model diagram
From Block (2)
From Block (3)
From Block (4)
Get Power System Operation and Control now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

