Evaluation Strategies, or simply Strategies, are a means for modularizing parallel code by separating the algorithm from the parallelism. Sometimes they require you to rewrite your algorithm, but once you do so, you will be able to parallelize it in different ways just by substituting a new Strategy.
Concretely, a Strategy is a function in the Eval monad that takes a
value of type a and returns the same value:
typeStrategya=a->Evala
The idea is that a Strategy takes a data structure as input, traverses
the structure creating parallelism with rpar and rseq, and then
returns the original value.
Here’s a simple example: Let’s create a Strategy for pairs that
evaluates the two components of the pair in parallel. We want a
function parPair with the following type:
parPair::Strategy(a,b)
From the definition of the Strategy type previously shown, we know that this
type is the same as (a,b) -> Eval (a,b). So parPair is a function
that takes a pair, does some computation in the Eval monad, and
returns the pair again. Here is its definition:
strat.hs
parPair::Strategy(a,b)parPair(a,b)=doa'<-rparab'<-rparbreturn(a',b')
This is similar to the rpar/rpar pattern that we saw in
The Eval Monad, rpar, and rseq. The difference is that we’ve packaged it up
as a Strategy: It takes a data structure (in this case a pair),
creates some parallelism using rpar, and then returns the same data structure.
We’ll see this in action in a moment, but first we need to know how to
use a Strategy. Using a Strategy consists of applying it to its
input and running the Eval computation to get the output. We could
write that directly with runEval; for example, to evaluate the pair
(fib 35, fib 36) in parallel, we could write:
runEval(parPair(fib35,fib36))
This works just fine, but it turns out to be much nicer to package up
the application of a Strategy into a function named using:
using::a->Strategya->ax`using`s=runEval(sx)
The using function takes a value of type a and a Strategy for a,
and applies the Strategy to the value. We normally write using
infix, as its definition suggests. Here is the parPair example
above rewritten with using:
(fib35,fib36)`using`parPair
Why write it this way? Well, a Strategy returns the same value that it was passed, so we know that aside from its performance, the above code is equivalent to just:
(fib35,fib36)
So we’ve clearly separated the code that describes what the program
does (the pair) from the code that adds the parallelism (`using`
parPair). Indeed, everywhere we see x `using` s in our program,
we can delete the `using` s part and the program should produce the
same result.[6] Conversely, someone who is interested in
parallelizing the program can focus on modifying the Strategy without
worrying about breaking the program.
The example program strat.hs contains the parPair example just shown;
try running it yourself with one and two processors to see it compute
the two calls to fib in parallel.
The parPair Strategy embodies a fixed policy: It always evaluates
the components of the pair in parallel, and always to weak head normal
form. If we wanted to do something different with a pair—fully
evaluate the components to normal form, for example—we would have to
write a completely new Strategy. A better way to factor things is to
write a parameterized Strategy, which takes as arguments the
Strategies to apply to the components of the data structure. Here is
a parameterized Strategy for pairs:
strat.hs
evalPair::Strategya->Strategyb->Strategy(a,b)evalPairsasb(a,b)=doa'<-saab'<-sbbreturn(a',b')
This Strategy no longer has parallelism built in, so I’ve called it
evalPair instead of parPair.[7] It takes
two Strategy arguments, sa and sb, applies them to the
respective components of the pair, and then returns the pair.
Compared with parPair, we are passing in the functions to apply to a
and b instead of making fixed calls to rpar. So to define
parPair in terms of evalPair, we can just pass rpar as the
arguments:
parPair::Strategy(a,b)parPair=evalPairrparrpar
This means we’re using rpar itself as a Strategy:
rpar::Strategya
The type of rpar is a -> Eval a, which is equivalent to Strategy
a; rpar is therefore a Strategy for any type, with the effect of
starting the evaluation of its argument while the enclosing Eval
computation proceeds in parallel. (The rseq operation is also a
Strategy.)
But parPair is still restrictive, in that the components of the pair
are always evaluated to weak head normal form. What if we wanted to
fully evaluate the components using force, for example? We can make
a Strategy that fully evaluates its argument:
rdeepseq::NFDataa=>Strategyardeepseqx=rseq(forcex)
But how do we combine rpar with rdeepseq to give us a single
Strategy that fully evaluates its argument in parallel? We need one
further combinator, which is provided by Control.Parallel.Strategies:
rparWith::Strategya->Strategya
Think of rparWith s as wrapping the Strategy s in an rpar.
Now we can provide a parameterized version of parPair that
takes the Strategies to apply to the components:
parPair::Strategya->Strategyb->Strategy(a,b)parPairsasb=evalPair(rparWithsa)(rparWithsb)
And we can use parPair to write a Strategy that fully evaluates
both components of a pair in parallel:
parPairrdeepseqrdeepseq::(NFDataa,NFDatab)=>Strategy(a,b)
To break down what happens when this Strategy is applied to a pair:
parPair calls evalPair, and evalPair calls rparWith rdeepseq
on each component of the pair. So the effect is that each component
will be fully evaluated to normal form in parallel.
When using these parameterized Strategies, we sometimes need a way
to say, “Don’t evaluate this component at all.” The Strategy that
does no evaluation is called r0:
r0::Strategyar0x=returnx
For example, we can write a Strategy over a pair of pairs that
evaluates the first component (only) of both pairs in parallel.
evalPair(evalPairrparr0)(evalPairrparr0)::Strategy((a,b),(c,d))
The first rpar applies to a and the first r0 to b, while the
second rpar applies to c and the second r0 to d.
In Chapter 2, we defined a function parMap that would map a
function over a list in parallel. We can think of parMap as a
composition of two parts:
And indeed, with Strategies, we can express it exactly this way:
parMap::(a->b)->[a]->[b]parMapfxs=mapfxs`using`parListrseq
The parList function is a Strategy on lists that evaluates the list
elements in parallel. To define parList, we can take the same approach
that we took with pairs earlier and first define a parameterized
Strategy on lists, called evalList:
evalList::Strategya->Strategy[a]evalListstrat[]=return[]evalListstrat(x:xs)=dox'<-stratxxs'<-evalListstratxsreturn(x':xs')
Note that evalList walks the list recursively, applying the Strategy
parameter strat to each of the elements and building the result
list. Now we can define parList in terms of evalList, using
rparWith:
parList::Strategya->Strategy[a]parListstrat=evalList(rparWithstrat)
In fact, both evalList and parList are already provided by Control.Parallel.Strategies so you don’t have to define them yourself,
but it’s useful to see that their implementations are not mysterious.
As with parPair, the parList function is a parameterized Strategy. That is, it takes as an argument a Strategy on values of type a and
returns a Strategy for lists of a. So parList describes a
family of Strategies on lists that evaluate the list elements in
parallel.
The parList Strategy covers a wide range of uses for parallelism in typical Haskell programs; in many cases, a single parList is all
that is needed to expose plenty of parallelism.
Returning to our Sudoku solver from Chapter 2 for a moment:
instead of our own hand-written parMap, we could have used
parList:
sudoku5.hs
letsolutions=mapsolvepuzzles`using`parListrseq
Using rseq as the Strategy for the list elements is enough here: The
result of solve is a Maybe, so evaluating it to
weak head normal form forces the solver to determine whether the puzzle has a solution.
This version has essentially the same performance as the version that used parMap in Chapter 2.
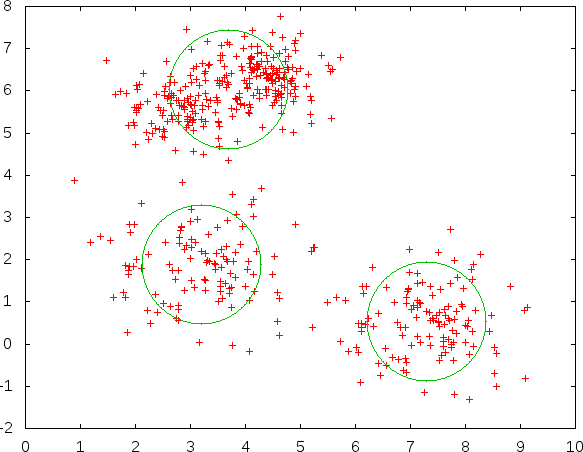
Let’s look at a slightly more involved example. In the K-Means problem, the goal is to partition a set of data points into clusters. Figure 3-1 shows an example data set, and the circles indicate the locations of the clusters that the algorithm should derive. From the locations of the clusters, partitioning the points is achieved by simply finding the closest cluster to each point.
Finding an optimal solution to the problem is too expensive to be practical. However, there are several heuristic techniques that are fast, and even though they don’t guarantee an optimal solution, in practice, they give good results. The most well-known heuristic technique for K-Means is Lloyd’s algorithm, which finds a solution by iteratively improving an initial guess. The algorithm takes as a parameter the number of clusters to find and makes an initial guess at the center of each cluster. Then it proceeds as follows:
- Assign each point to the cluster to which it is closest. This yields a new set of clusters.
- Find the centroid of each cluster (the average of all the points in the cluster).
- Repeat steps 1 and 2 until the cluster locations stabilize. We cut off processing after an arbitrarily chosen number of iterations, because sometimes the algorithm does not converge.
The initial guess can be constructed by randomly assigning each point in the data set to a cluster and then finding the centroids of those clusters.
The algorithm works in any number of dimensions, but we will use two for ease of visualization.
A complete Haskell implementation can be found in the directory kmeans in the sample code.
A data point is represented by the type Point, which is just a pair
of Doubles representing the x and y coordinates
respectively:[8]
dataPoint=Point!Double!Double
There are a couple of basic operations on Point:
zeroPoint::PointzeroPoint=Point00sqDistance::Point->Point->DoublesqDistance(Pointx1y1)(Pointx2y2)=((x1-x2)^2)+((y1-y2)^2)
We can make a zero point with zeroPoint, and find the square of the distance between two points
with sqDistance. The actual distance between the points would be
given by the square root of this value, but since we will only be
comparing distances, we can save time by comparing squared distances
instead.
Clusters are represented by the type Cluster:
dataCluster=Cluster{clId::Int,clCent::Point}
A Cluster contains its number (clId) and its centroid (clCent).
We will also need an intermediate type called PointSum:
dataPointSum=PointSum!Int!Double!Double
A PointSum represents the sum of a set of points; it contains the
number of points in the set and the sum of their x and y coordinates respectively. A PointSum is constructed
incrementally, by repeatedly adding points using addToPointSum:
addToPointSum::PointSum->Point->PointSumaddToPointSum(PointSumcountxsys)(Pointxy)=PointSum(count+1)(xs+x)(ys+y)
A PointSum can be turned into a Cluster by computing the centroid.
The x coordinate of the centroid is the sum of the x coordinates
of the points in the cluster divided by the total number of points,
and similarly for the y coordinate.
pointSumToCluster::Int->PointSum->ClusterpointSumToClusteri(PointSumcountxsys)=Cluster{clId=i,clCent=Point(xs/fromIntegralcount)(ys/fromIntegralcount)}
The roles of the types Point, PointSum, and Cluster in the
algorithm are as follows. The input is a set of points represented as
[Point], and an initial guess represented as [Cluster]. The
algorithm will iteratively refine the clusters until convergence is
reached.
-
Step 1 divides the points into new sets by finding the
Clusterto which eachPointis closest. However, instead of collecting sets ofPoints, we build up aPointSumfor each cluster. This is an optimization that avoids constructing the intermediate data structure and allows the algorithm to run in constant space. We’ll represent the output of this step asVector PointSum. -
The
Vector PointSumis fed into step 2, which makes aClusterfrom eachPointSum, giving[Cluster]. - The result of step 2 is fed back into step 1 until convergence is reached.
The function assign implements step 1 of the algorithm, assigning
points to clusters and building a vector of PointSums:
assign::Int->[Cluster]->[Point]->VectorPointSumassignnclustersclusterspoints=Vector.create$dovec<-MVector.replicatenclusters(PointSum000)letaddpointp=doletc=nearestp;cid=clIdcps<-MVector.readveccidMVector.writeveccid$!addToPointSumpspmapM_addpointpointsreturnvecwherenearestp=fst$minimumBy(compare`on`snd)[(c,sqDistance(clCentc)p)|c<-clusters]
Given a set of clusters and a set of points, the job of assign is to
decide, for each point, which cluster is closest. For each cluster, we
build up a PointSum of the points that were found to be closest to
it. The code has been carefully optimized, using mutable vectors from
the vector package; the details aren’t important here.
The function makeNewClusters implements step 2 of the algorithm:
makeNewClusters::VectorPointSum->[Cluster]makeNewClustersvec=[pointSumToClusterips|(i,ps@(PointSumcount__))<-zip[0..](Vector.toListvec),count>0]
Here we make a new Cluster, using pointSumToCluster, from each
PointSum produced by assign. There is a slight complication in
that we have to avoid creating a cluster with no points, because it
cannot have a centroid.
Finally step combines assign and makeNewClusters to implement
one complete iteration:
step::Int->[Cluster]->[Point]->[Cluster]stepnclustersclusterspoints=makeNewClusters(assignnclustersclusterspoints)
To complete the algorithm, we need a loop to repeatedly apply the step
function until convergence. The function kmeans_seq implements this:
kmeans_seq::Int->[Point]->[Cluster]->IO[Cluster]kmeans_seqnclusterspointsclusters=letloop::Int->[Cluster]->IO[Cluster]loopnclusters|n>tooMany=do--
putStrLn"giving up."returnclustersloopnclusters=doprintf"iteration %d\n"nputStr(unlines(mapshowclusters))letclusters'=stepnclustersclusterspoints--
ifclusters'==clusters--
thenreturnclusterselseloop(n+1)clusters'inloop0clusterstooMany=80
-
The first argument to
loopis the number of iterations completed so far. If this figure reaches the limittooMany, then we bail out (sometimes the algorithm does not converge).-
After printing the iteration number and the current clusters for diagnostic purposes, we calculate the next iteration by calling the function
step. The arguments tostepare the number of clusters, the current set of clusters, and the set of points.-
If this iteration did not change the clusters, then the algorithm has converged, and we return the result. Otherwise, we do another iteration.
We compile this program in the same way as before:
$ cd kmeans $ ghc -O2 -threaded -rtsopts -eventlog kmeans.hs
The sample code comes with a program to generate some input data,
GenSamples.hs, which uses the normaldistribution package to
generate a realistically clustered set of values. The data set is
large, so it isn’t included with the sample code, but you can generate
it using GenSamples:
$ ghc -O2 GenSamples.hs $ ./GenSamples 5 50000 100000 1010
This should generate a data set of about 340,000 points with 5
clusters in the file points.bin.
Run the kmeans program using the sequential algorithm:
$ ./kmeans seq
The program will display the clusters at each iteration and should converge after 65 iterations.
Note that the program displays its own running time at the end; this is because there is a significant amount of time spent reading in the sample data at the beginning, and we want to be able to calculate the parallel speedup for the portion of the runtime spent computing the K-Means algorithm only.
How can this algorithm be parallelized? One place that looks
profitable to parallelize is the assign function because it is
essentially just a map over the points, and indeed that is where we
will concentrate our efforts. The operations are too fine-grained
here to use a simple parMap or parList as we did before; the
overhead of the parMap will swamp the parallelism, so we need to
increase the size of the operations. One way to do that is to divide
the list of points into chunks, and process the chunks in parallel.
First we need some code to split a list into chunks:
split::Int->[a]->[[a]]splitnumChunksxs=chunk(lengthxs`quot`numChunks)xschunk::Int->[a]->[[a]]chunkn[]=[]chunknxs=as:chunknbswhere(as,bs)=splitAtnxs
So we can split the list of points into chunks and map assign over
the list of chunks. But what do we do with the results? We have a
list of Vector PointSums that we need to combine into a single
Vector PointSum. Fortunately, PointSums can be added together:
addPointSums::PointSum->PointSum->PointSumaddPointSums(PointSumc1x1y1)(PointSumc2x2y2)=PointSum(c1+c2)(x1+x2)(y1+y2)
And using this, we can combine vectors of PointSums:
combine::VectorPointSum->VectorPointSum->VectorPointSumcombine=Vector.zipWithaddPointSums
We now have all the pieces to define a parallel version of step:
parSteps_strat::Int->[Cluster]->[[Point]]->[Cluster]parSteps_stratnclustersclusterspointss=makeNewClusters$foldr1combine$(map(assignnclustersclusters)pointss`using`parListrseq)
The arguments to parSteps_strat are the same as for step, except
that the list of points is now a list of lists of points, that is, the
list of points divided into chunks by split. We want to pass in the chunked data rather than call split inside parSteps_strat so
that we can do the chunking of the input data just once instead of
repeating it for each iteration.
The kmeans_strat function below is our parallel version of
kmeans_seq, the only differences being that we call split to
divide the list of points into chunks (![]() ) and we call
) and we call parSteps_strat instead of steps (![]() ):
):
kmeans_strat::Int->Int->[Point]->[Cluster]->IO[Cluster]kmeans_stratnumChunksnclusterspointsclusters=letchunks=splitnumChunkspoints--loop::Int->[Cluster]->IO[Cluster]loopnclusters|n>tooMany=doprintf"giving up."returnclustersloopnclusters=doprintf"iteration %d\n"nputStr(unlines(mapshowclusters))letclusters'=parSteps_stratnclustersclusterschunks--ifclusters'==clustersthenreturnclusterselseloop(n+1)clusters'inloop0clusters
Note that the number of chunks doesn’t have to be related to the number of processors; as we saw earlier, it is better to produce plenty of sparks and let the runtime schedule them automatically, because this should enable the program to scale over a wide range of processors.
Next we’re going on an exploration of the performance of this parallel program. Along the way, we’ll learn several lessons about the kinds of things that can go wrong when parallelizing Haskell code, how to look out for them using ThreadScope, and how to fix them.
We’ll start by taking some measurements of the speedup for various numbers of cores. When running the program in parallel, we get to choose the number of chunks to divide the input into, and for these measurements I’ll use 64 (but we’ll revisit this in Granularity). The program is run in parallel like this:
$ ./kmeans strat 64 +RTS -N2
strat indicates that we want to use the Strategies version of
the algorithm, and 64 is the number of chunks to divide the input data
into. Here, I’m telling the GHC runtime to use two cores.
Here are the speedup results I get on my computer for the kmeans program I showed
earlier.[9] For each
measurement, I ran the program a few times and took the average
runtime.[10]
We can see that speedup is quite good for two to three cores but starts to drop off at four cores. Still, a 2.6 speedup on 4 cores is reasonably respectable.
The ThreadScope profile gives us some clues about why the speedup might be less than we hope. The overall view of the four-core run can be seen in Figure 3-2.
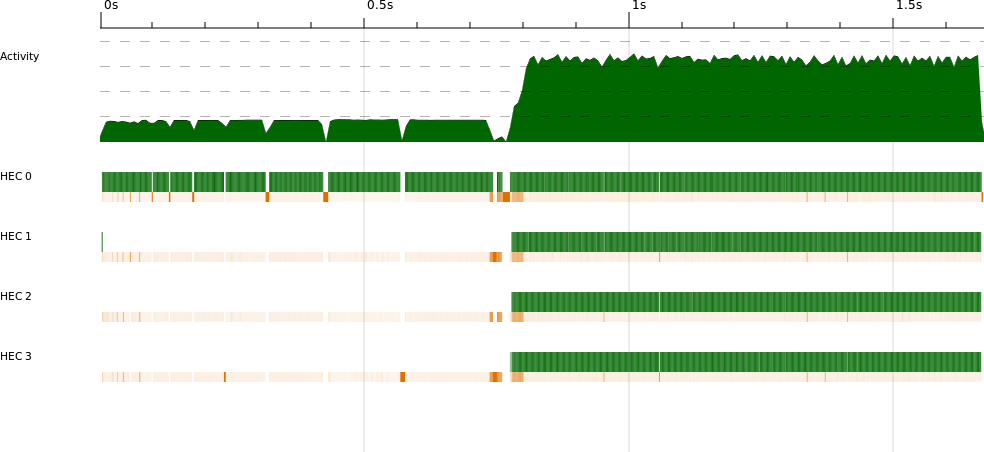
We can clearly see the sequential section at the start, where the program reads in the input data. But that isn’t a problem; remember that the program emits its own timing results, which begin at the parallel part of the run. The parallel section itself looks quite good; all cores seem to be running for the duration. Let’s zoom in on the beginning of the parallel section, as shown in Figure 3-3.
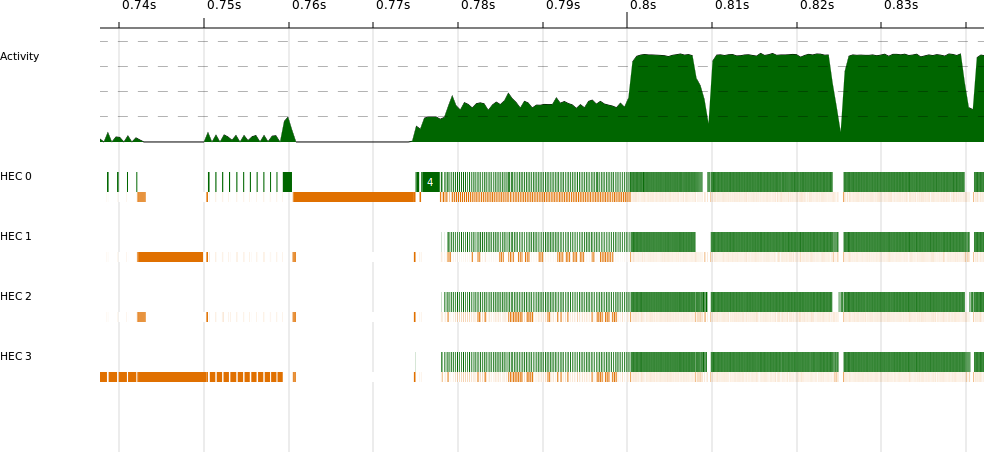
There’s a segment between 0.78s and 0.8s where, although parallel
execution has started, there is heavy GC activity. This is similar to
what we saw in Example: Parallelizing a Sudoku Solver, where the work of splitting
the input data into lines was overlapped with the parallel execution.
In the case of kmeans, the act of splitting the data set into chunks
is causing the extra work.
The sequential version of the algorithm doesn’t need to split the data into
chunks, so chunking is a source of extra overhead in the parallel
version. This is one reason that we aren’t achieving full speedup.
If you’re feeling adventurous, you might want to see whether you can
avoid this chunking overhead by using Vector instead of a list to
represent the data set, because Vectors can be sliced in O(1)
time.
Let’s look at the rest of the parallel section in more detail (see Figure 3-4).
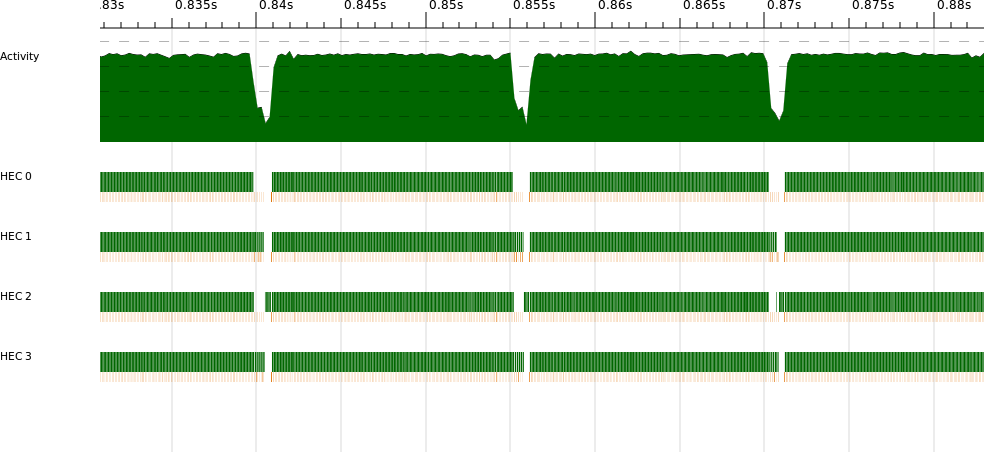
The parallel execution, which at first looked quite uniform, actually
consists of a series of humps when we zoom in. Remember that the
algorithm performs a series of iterations over the data set—these
humps in the profile correspond to the iterations. Each iteration is a separate
parallel segment, and between the iterations lies some sequential
execution. We expect a small amount of sequential execution
corresponding to makeNewClusters, combine, and the comparison
between the new and old clusters in the outer loop.
Let’s see whether the reality matches our expectations by zooming in on one of the gaps to see more clearly what happens between iterations (Figure 3-5).
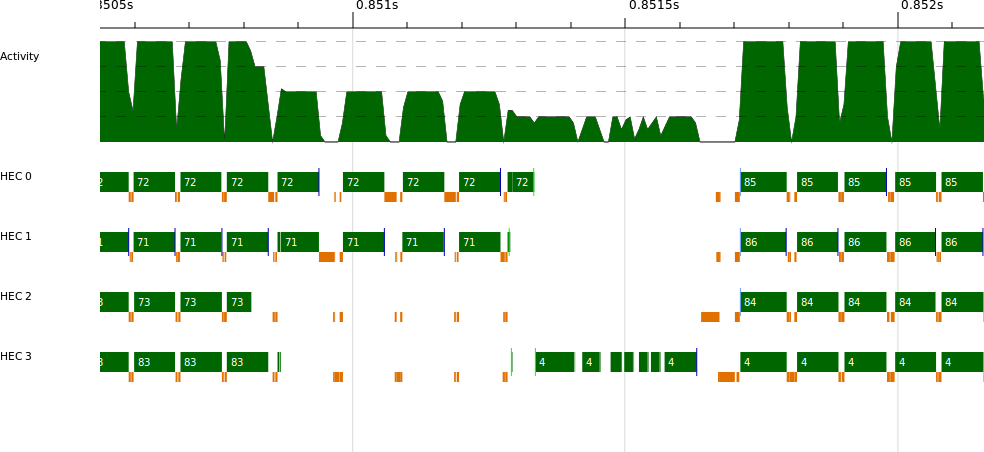
There’s quite a lot going on here. We can see the parallel execution of the previous iteration tailing off, as a couple of cores run longer than the others. Following this, there is some sequential execution on HEC 3 before the next iteration starts up in parallel.
Looking more closely at the sequential bit on HEC 3, we can see some gaps where nothing appears to be happening at all. In the ThreadScope GUI, we can show the detailed events emitted by the RTS (look for the “Raw Events” tab in the lower pane), and if we look at the events for this section, we see:
0.851404792s HEC 3: stopping thread 4 (making a foreign call) 0.851405771s HEC 3: running thread 4 0.851406373s HEC 3: stopping thread 4 (making a foreign call) 0.851419669s HEC 3: running thread 4 0.851451713s HEC 3: stopping thread 4 (making a foreign call) 0.851452171s HEC 3: running thread 4 ...
The program is popping out to make several foreign calls during this
period. ThreadScope doesn’t tell us any more than this, but it’s
enough of a clue: A foreign call usually indicates some kind of I/O,
which should remind us to look back at what happens between iterations in the
kmeans_seq function:
loopnclusters=doprintf"iteration %d\n"nputStr(unlines(mapshowclusters))...
We’re printing some output. Furthermore, we’re doing this in the sequential part of the program, and Amdahl’s law is making us pay for it in parallel speedup.
Commenting out these two lines (in both kmeans_seq and
kmeans_strat, to be fair) improves the parallel speedup from 2.6 to
3.4 on my quad-core machine. It’s amazing how easy it is to make a
small mistake like this in parallel programming, but fortunately
ThreadScope helps us identify the problem, or at least gives us clues
about where we should look.
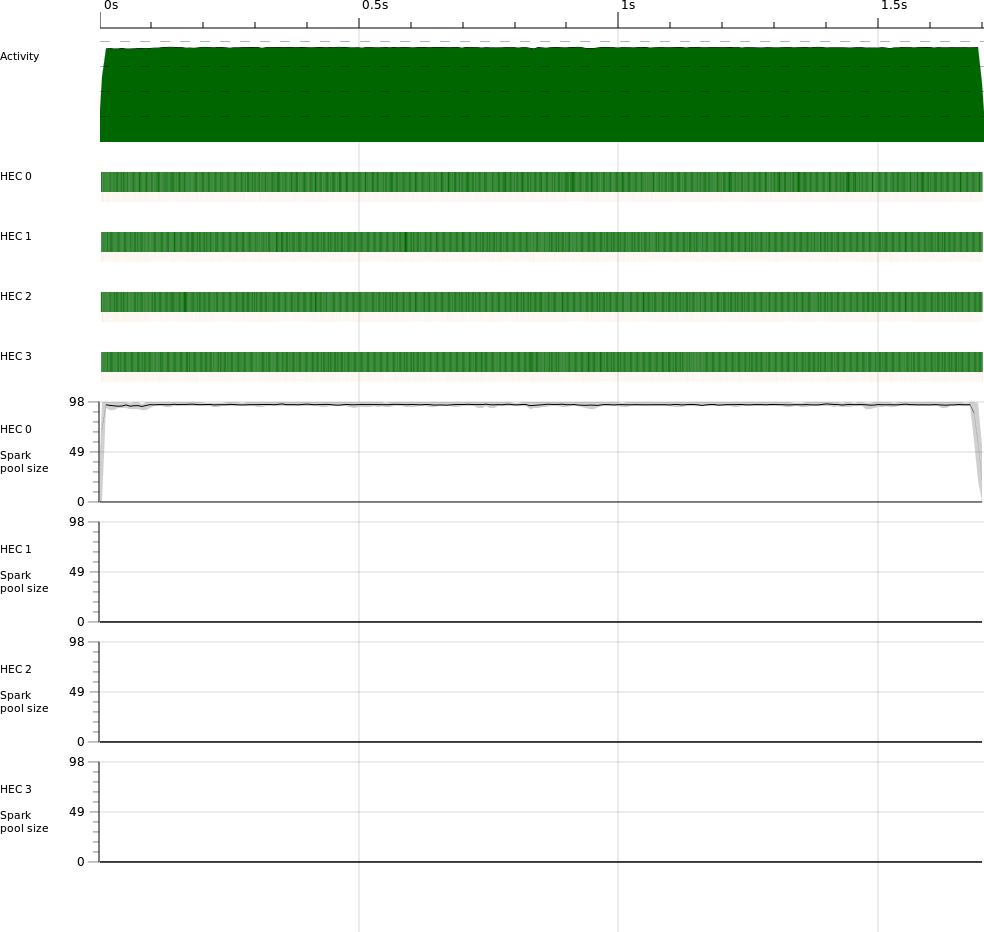
We can also use ThreadScope to visualize the creation and use of sparks
during the run of the program. Figure 3-6 shows the profile for
kmeans running on four cores, showing the spark pool size over time for
each HEC (these graphs are enabled in the ThreadScope GUI from the
“Traces” tab in the left pane).
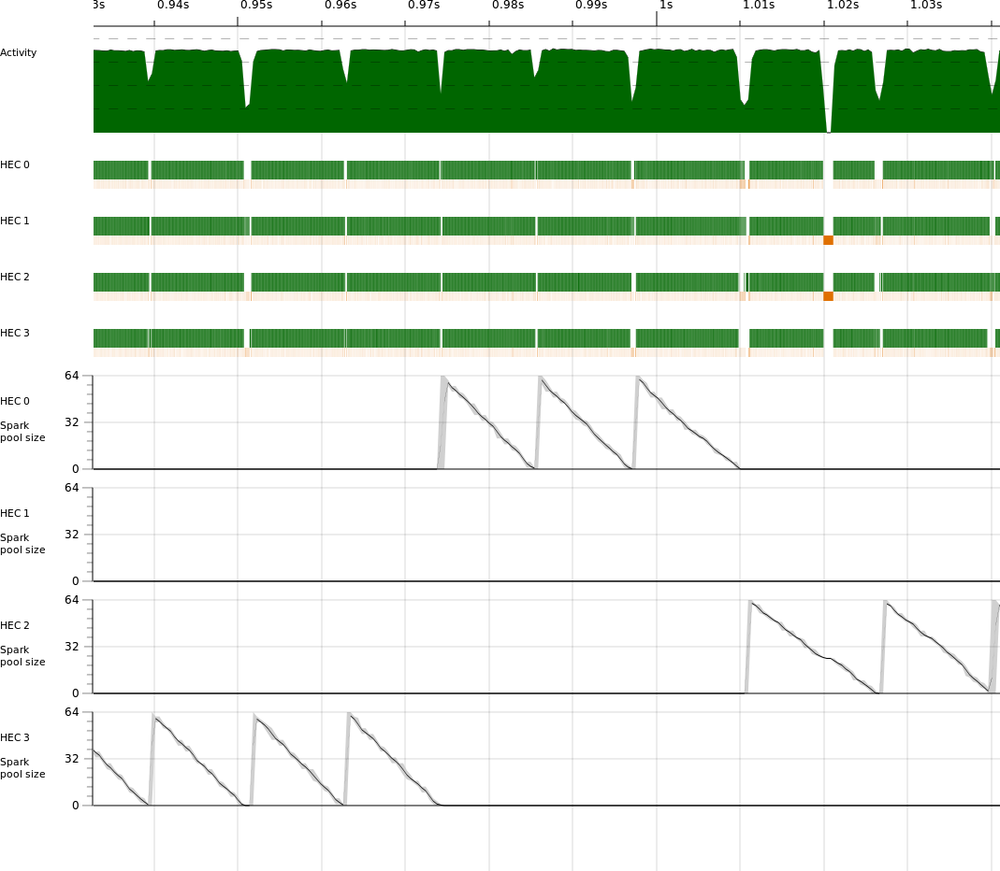
The figure clearly shows that as each iteration starts, 64 sparks are created on one HEC and then are gradually consumed. What is perhaps surprising is that the sparks aren’t always generated on the same HEC; this is the GHC runtime moving work behind the scenes as it tries to keep the load balanced across the cores.
There are more spark-related graphs available in ThreadScope, showing the rates of spark creation and conversion (running sparks). All of these can be valuable in understanding the performance characteristics of your parallel program.
Looking back at Figure 3-5, I remarked earlier that the parallel section didn’t finish evenly, with two cores running a bit longer than the others. Ideally, we would have all the cores running until the end to maximize our speedup.
As we saw in Example: Parallelizing a Sudoku Solver, having too few work items in our parallel program can impact the speedup, because the work items can vary in cost. To get a more even run, we want to create fine-grained work items and more of them.
To see the effect of this, I ran kmeans with various numbers of
chunks from 4 up to 512, and measured the runtime on 4 cores. The
results are shown in Figure 3-7.
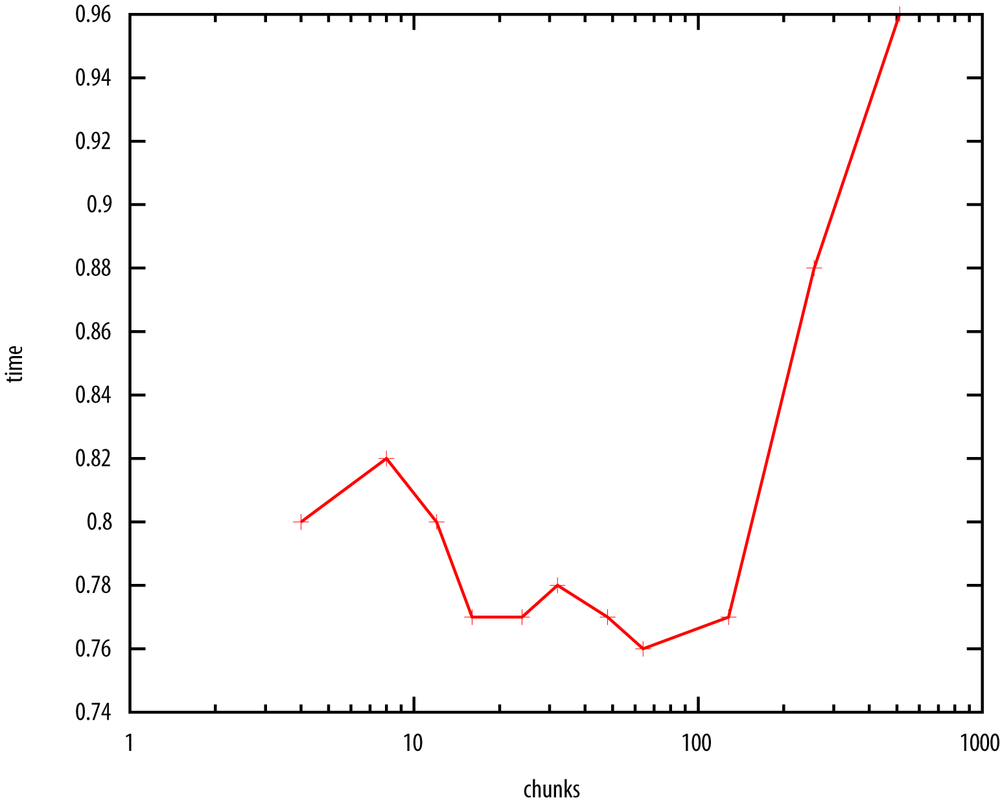
We can see not only that having too few chunks is not good for the reasons given above, but also having too many can have a severe impact. In this case, the sweet spot is somewhere around 50-100.
Why does having too many chunks increase the runtime? There are two reasons:
- There is some overhead per chunk in creating the spark and arranging to run it on another processor. As the chunks get smaller, this overhead becomes more significant.
- The amount of sequential work that the program has to do is greater. Combining the results from 512 chunks takes longer than 64, and because this is in the sequential part, it significantly impacts the parallel performance.
Recall the definition of parList:
parList::Strategya->Strategy[a]parListstrat=evalList(rparWithstrat)
And the underlying parameterized Strategy on lists, evalList:
evalList::Strategya->Strategy[a]evalListstrat[]=return[]evalListstrat(x:xs)=dox'<-stratxxs'<-evalListstratxsreturn(x':xs')
As evalList traverses the list applying the strategy strat to the
list elements, it remembers each value returned by strat (bound to
x'), and constructs a new list from these values. Why? Well, one
answer is that a Strategy must return a data structure equal to the
one it was passed.
But do we really need to build a new list? After all, this means that
evalList is not tail-recursive; the recursive call to
evalList is not the last operation in the do on its right-hand
side, so evalList requires stack space linear in the length of
the input list.
Couldn’t we just write a tail-recursive version of parList instead?
Perhaps like this:
parList::Strategya->Strategy[a]parListstratxs=dogoxsreturnxswherego[]=return()go(x:xs)=dorparWithstratxgoxs
After all, this is type-correct and seems to call rparWith on each
list element as required.
Unfortunately, this version of parList has a serious problem: All the
parallelism it creates will be discarded by the garbage
collector. The omission of the result list turns out to be
crucial. Let’s take a look at the data structures that our original,
correct implementations of parList and evalList created
(Figure 3-8).
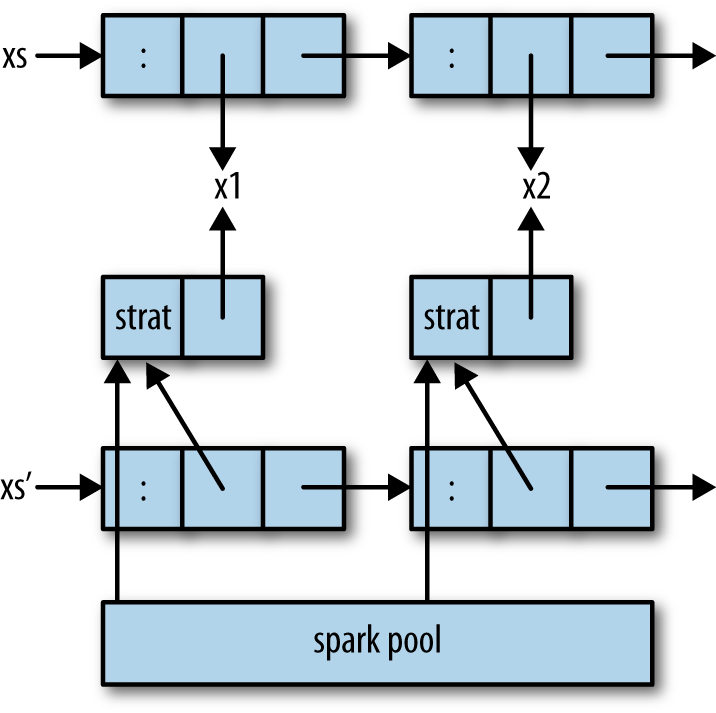
At the top of the diagram is the input list xs: a linked list
of cells, each of which points to a list element (x1, x2, and so
forth). At the bottom of the diagram is the spark pool, the runtime
system data structure that stores references to sparks in the heap.
The other structures in the diagram are built by parList (the
correct version, not the one I most recently showed). Each strat box represents the
strategy strat applied to an element of the original list, and
xs' is the linked list of cells in the output list. The spark pool
contains pointers to each of the strat boxes; these are the pointers
created by each call to rparWith.
The GHC runtime regularly checks the spark pool for any entries that are not required by the program and removes them. It would be bad to retain entries that aren’t needed, because that could cause the program to hold on to memory unnecessarily, leading to a space leak. We don’t want parallelism to have a negative impact on performance.
How does the runtime know whether an entry is needed? The same way it
knows whether any item in memory is needed: There must be a pointer to
it from something else that is needed. This is the reason that parList
creates a new list xs'. Suppose we did not build the new
list xs', as in the tail-recursive version of parList above.
Then the only reference to each strat box in the heap would be from
the spark pool, and hence the runtime would automatically sweep all
those references from the spark pool, discarding the parallelism.
So we build a new list xs' to hold references to the strat calls
that we need to retain.
The automatic discarding of unreferenced sparks has another benefit besides avoiding space leaks; suppose that under some circumstances the program does not need the entire list. If the program simply forgets the unused remainder of the list, the runtime system will clean up the unreferenced sparks from the spark pool and will not waste any further parallel processing resources on evaluating those sparks. The extra parallelism in this case is termed speculative, because it is not necessarily required, and the runtime will automatically discard speculative tasks that it can prove will never be required—a useful property!
Although the runtime system’s discarding of unreferenced sparks is
certainly useful in some cases, it can be tricky to work with because
there is no language-level support for catching mistakes. Fortunately,
the runtime system will tell us if it garbage-collects unreferenced
sparks. For example, if you use the tail-recursive parList with the
Sudoku solver from Chapter 2, the +RTS -s stats will show
something like this:
SPARKS: 1000 (2 converted, 0 overflowed, 0 dud, 998 GC'd, 0 fizzled)
Garbage-collected sparks are reported as “GC’d.” ThreadScope will also indicate GC’d sparks in its spark graphs.
If you see that a large number of sparks are GC’d, it’s a good indication that sparks are being removed from the spark pool before they can be used for parallelism. Unless you are using speculation, a non-zero figure for GC’d sparks is probably a bad sign.
All the combinators in the Control.Parallel.Strategies libraries
retain references to sparks correctly. These are the rules of thumb for not
shooting yourself in the foot:
-
Use
usingto apply Strategies instead ofrunEval; it encourages the right pattern, in which the program uses the results of applying the Strategy. When writing your own
Evalmonad code, this is wrong:do...rpar(fx)...Equivalently, using
rparWithwithout binding the result is wrong. However, this is OK:do...y<-rpar(fx)...y...And this might be OK, as long as
yis required by the program somewhere:do...rpary...
A common pattern in Haskell programming is to use a lazy list as a stream so that the program can consume input while simultaneously producing output and consequently run in constant space. Such programs present something of a challenge for parallelism; if we aren’t careful, parallelizing the computation will destroy the lazy streaming property and the program will require space linear in the size of the input.
To demonstrate this, we will use the sample program rsa.hs,
an implementation of RSA encryption and decryption. The program
takes two command line arguments: the first specifies which action to
take, encrypt or decrypt, and the second is either the filename of
the file to read, or the character - to read from stdin. The
output is always produced on stdout.
The following example uses the program to encrypt the message "Hello World!":
$ echo 'Hello World!' | ./rsa encrypt - 11656463941851871045300458781178110195032310900426966299882646602337646308966290 04616367852931838847898165226788260038683620100405280790394258940505884384435202 74975036125752600761230510342589852431747
And we can test that the program successfully decrypts the output,
producing the original text, by piping the output back into rsa
decrypt:
$ echo "Hello World!" | ./rsa encrypt - | ./rsa decrypt - Hello World!
The rsa program is a stream transformer, consuming input and
producing output lazily. We can see this by looking at the RTS stats:
$ ./rsa encrypt /usr/share/dict/words >/dev/null +RTS -s
8,040,128,392 bytes allocated in the heap
66,756,936 bytes copied during GC
186,992 bytes maximum residency (71 sample(s))
36,584 bytes maximum slop
2 MB total memory in use (0 MB lost due to fragmentation)The /usr/share/dict/words file is about 1 MB in size, but the program has a maximum residency (live memory) of 186,992 bytes.
Let’s try to parallelize the program. The program uses the lazy
ByteString type from Data.ByteString.Lazy to achieve streaming,
and the top-level encrypt function has this type:
encrypt::Integer->Integer->ByteString->ByteString
The two Integers are the key with which to encrypt the data. The
implementation of encrypt is a beautiful pipeline composition:
encryptne=B.unlines--.map(B.pack.show.poweren.code)--.chunk(sizen)--
-
Divide the input into chunks. Each chunk is encrypted separately; this has nothing to do with parallelism.
-
Encrypt each chunk.
-
Concatenate the result as a sequence of lines.
We won’t delve into the details of the RSA implementation here, but if
you’re interested, go and look at the code in rsa.hs (it’s fairly
short). For the purposes of parallelism, all we need to know is that
there’s a map on the second line, so that’s our target for
parallelization.
First, let’s try to use the parList Strategy that we have seen before:
encryptne=B.unlines.withStrategy(parListrdeepseq)--.map(B.pack.show.poweren.code).chunk(sizen)
-
I’m using
withStrategyhere, which is just a version ofusingwith the arguments flipped; it is slightly nicer in situations like this. The Strategy isparList, withrdeepseqas the Strategy to apply to the list elements (the list elements are lazyByteStrings, so we want to ensure that they are fully evaluated).
If we run this program on four cores, the stats show something interesting:
6,251,537,576 bytes allocated in the heap
44,392,808 bytes copied during GC
2,415,240 bytes maximum residency (33 sample(s))
550,264 bytes maximum slop
10 MB total memory in use (0 MB lost due to fragmentation)The maximum residency has increased to 2.3 MB, because the parList
Strategy forces the whole spine of the list, preventing the program
from streaming in constant space. The speedup in this case was 2.2;
not terrible, but not great either. We can do better.
The Control.Parallel.Strategies library provides a Strategy to solve
exactly this problem, called parBuffer:
parBuffer::Int->Strategya->Strategy[a]
The parBuffer function has a similar type to parList but takes an Int
argument as a buffer size. In contrast to parList which eagerly
creates a spark for every list element, parBuffer N creates
sparks for only the first N elements of the list, and then creates
more sparks as the result list is consumed. The effect is that there
will always be N sparks available until the end of the list is
reached.
The disadvantage of parBuffer is that we have to choose a particular
value for the buffer size, and as with the chunk factor we saw
earlier, there will be a “best value” somewhere in the range.
Fortunately, performance is usually not too sensitive to this value,
and something in the range of 50-500 is often good. So let’s see how
well this works:
encryptne=B.unlines.withStrategy(parBuffer100rdeepseq)--.map(B.pack.show.poweren.code).chunk(sizen)
This programs achieves a speedup of 3.5 on 4 cores. Furthermore, it
runs in much less memory than the parList version:
6,275,891,072 bytes allocated in the heap
27,749,720 bytes copied during GC
294,872 bytes maximum residency (58 sample(s))
62,456 bytes maximum slop
4 MB total memory in use (0 MB lost due to fragmentation)We can expect it to need more memory than the sequential version, which required only 2 MB, because we’re performing many computations in parallel. Indeed, a higher residency is common in parallel programs for the simple reason that they are doing more work, although it’s not always the case; sometimes parallel evaluation can reduce memory overhead by evaluating thunks that were causing space leaks.
ThreadScope’s spark pool graph shows that parBuffer really does keep
a constant supply of sparks, as shown in Figure 3-9.
The spark pool on HEC 0 constantly hovers around 90-100 sparks.
In programs with a multistage pipeline, interposing more calls to
withStrategy in the pipeline can expose more parallelism.
When parallelizing K-Means in Parallelizing K-Means, we divided
the input data into chunks to avoid creating parallelism with
excessively fine granularity. Chunking is a common technique, so the
Control.Parallel.Strategies library provides a version of parList
that has chunking built in:
parListChunk::Int->Strategya->Strategy[a]
The first argument is the number of elements in each chunk; the list
is split in the same way as the chunk function that we saw earlier
in the kmeans example. You might find parListChunk useful if you
have a list with too many elements to spark every one, or when the
list elements are too cheap to warrant a spark each.
The spark pool has a fixed size, and when the pool is full, subsequent
sparks are dropped and reported as overflowed in the +RTS -s stats output. If you see some overflowed sparks, it is probably a
good idea to create fewer sparks; replacing parList with
parListChunk is a good way to do that.
Note that chunking the list incurs some overhead, as we noticed in the
earlier kmeans example when we used chunking directly. For that
reason, in kmeans we created the chunked list once and shared it
amongst all the iterations of the algorithm, rather than using
parListChunk, which would chunk the list every time.
I mentioned at the beginning of this chapter that if we see an expression of this form:
x`using`s
We can delete `using` s, leaving an equivalent program. For this to be true, the Strategy s must obey the identity property; that is, the value it returns must be equal to the value it was passed. The operations provided by the Control.Parallel.Strategies library all satisfy this property, but unfortunately it isn’t possible to enforce it for arbitrary user-defined Strategies. Hence we cannot guarantee that x `using` s == x, just as we cannot guarantee that all instances of Monad satisfy the monad laws, or that all instances of Eq are reflexive. These properties are satisfied by convention only; this is just something to be aware of.
There is one more caveat to this property. The
expression x `using` s might be less defined than x, because it
evaluates more structure of x than the context does. What does
less defined mean? It means that the program containing x `using` s might fail with an error when simply x would not. A trivial
example of this is:
$snd(1`div`0,"Hello!")
This program works and prints "Hello!", but:
$snd((1`div`0,"Hello!")`using`rdeepseq)
This program fails with divide by zero. The original program didn’t
fail because the erroneous expression was never evaluated, but adding
the Strategy has caused the program to fully evaluate the pair, including
the division by zero.
This is rarely a problem in practice; if the Strategy evaluates more than the program would have done anyway, the Strategy is probably wasting effort and needs to be modified.
[6] This comes with a couple of minor caveats that we’ll describe in The Identity Property.
[7] The evalPair function is
provided by Control.Parallel.Strategies as evalTuple2.
[8] The actual implementation adds UNPACK pragmas for efficiency, which I have omitted here for clarity.
[9] A quad-core Intel i7-3770
[10] To do this scientifically, you would need to be much more rigorous, but the goal here is just to optimize our program, so rough measurements are fine.
Get Parallel and Concurrent Programming in Haskell now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

