7.4. PROPORTIONAL-PLUS-INTEGRAL-PLUS DERIVATIVE (PID) COMPENSATORS
PID compensators are another form of compensation frequently used in control systems, especially in the industrial process control field. They are very popular in the industrial process control field due to their robust (insensitive) performance over a wide range of operating conditions including plant uncertainty, parameter variation, and external disturbances. Robust control is presented in Section 8.10 of Chapter 8.
Assuming that the input to the PID compensator is e(t) and its output is u(t), the equation defining the operation of the PID compensator is given by:

Figure 7.16 illustrates a block diagram representation of Eq. (7.32). The transfer function of the PID compensator is obtained as follows:
![]()
![]()
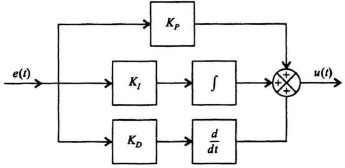
Figure 7.16 PID compensator block-diagram representation of Eq. (7.32).
The resulting transfer function of the PID compensator, Gc(s), is given by
![]()
Figure 7.17 illustrates a block diagram representation of Eq. (7.35) ...
Get Modern Control System Theory and Design, 2nd Edition now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

