Chapter 1. Introduction to Robot Building
This book takes you through the steps needed to build a robot capable of autonomous movement and remote control. Build instructions are provided for 2WD (two wheel drive) and 4WD (four wheel drive) platforms. The platforms shown in Figure 1-1 and Figure 1-2 will make the construction a snap, but you can build your own robot chassis if you prefer. The connection and use of the control electronics and sensors are fully explained and the source code is included in the book and available for download online (see How to Contact Us for more information on downloading the sample code).
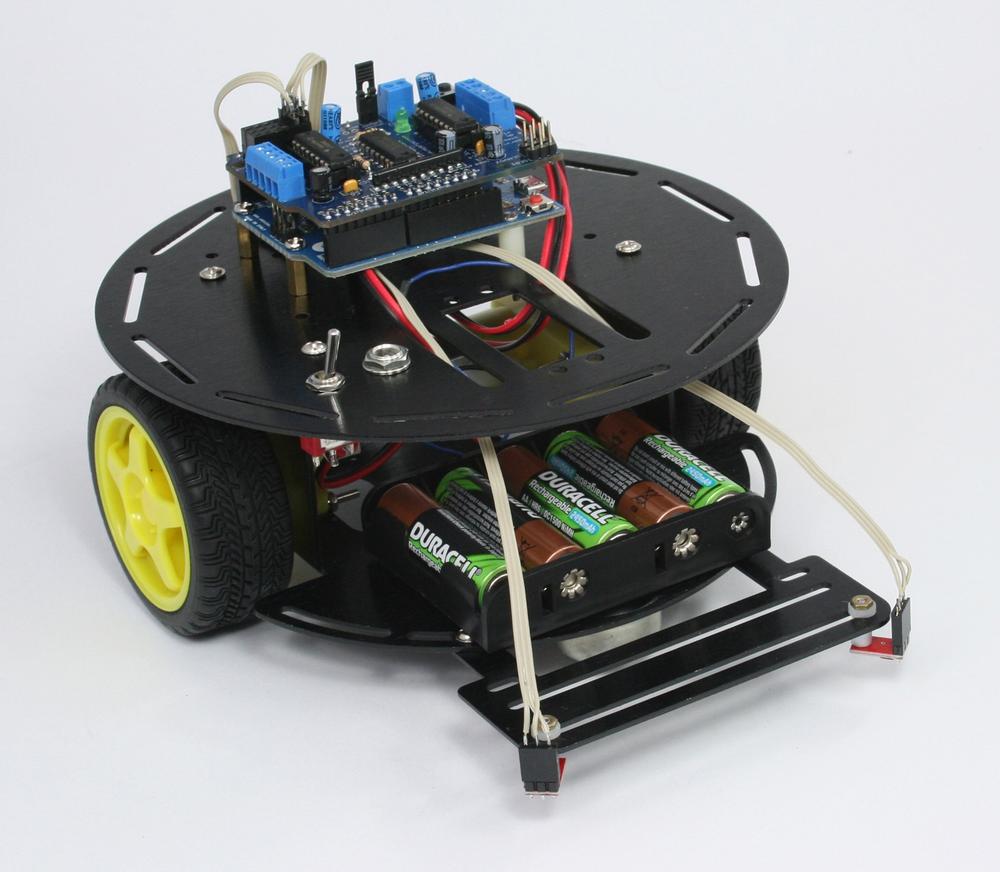
Figure 1-1. The assembled ...
Get Make an Arduino-Controlled Robot now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

