Computer vision [2] is the transformation of data from a still or video camera into either a decision or a new representation. All such transformations are done for achieving some particular goal. The input data may include some contextual information such as "the camera is mounted in a car" or "laser range finder indicates an object is 1 meter away". The decision might be "there is a person in this scene" or "there are 14 tumor cells on this slide". A new representation might mean turning a color image into a grayscale image or removing camera motion from an image sequence.
Because we are such visual creatures, it is easy to be fooled into thinking that computer vision tasks are easy. How hard can it be to find, say, a car when you are staring at it in an image? Your initial intuitions can be quite misleading. The human brain divides the vision signal into many channels that stream different kinds of information into your brain. Your brain has an attention system that identifies, in a task-dependent way, important parts of an image to examine while suppressing examination of other areas. There is massive feedback in the visual stream that is, as yet, little understood. There are widespread associative inputs from muscle control sensors and all of the other senses that allow the brain to draw on cross-associations made from years of living in the world. The feedback loops in the brain go back to all stages of processing including the hardware sensors themselves (the eyes), which mechanically control lighting via the iris and tune the reception on the surface of the retina.
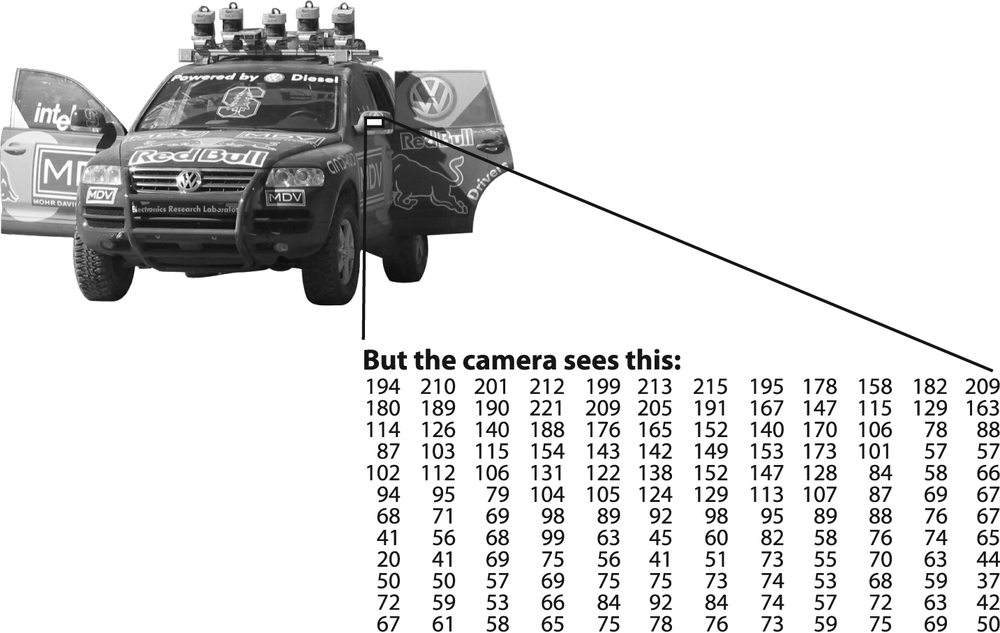
In a machine vision system, however, a computer receives a grid of numbers from the camera or from disk, and that's it. For the most part, there's no built-in pattern recognition, no automatic control of focus and aperture, no cross-associations with years of experience. For the most part, vision systems are still fairly naïve. Figure 1-1 shows a picture of an automobile. In that picture we see a side mirror on the driver's side of the car. What the computer "sees" is just a grid of numbers. Any given number within that grid has a rather large noise component and so by itself gives us little information, but this grid of numbers is all the computer "sees". Our task then becomes to turn this noisy grid of numbers into the perception: "side mirror". Figure 1-2 gives some more insight into why computer vision is so hard.
In fact, the problem, as we have posed it thus far, is worse than hard; it is formally impossible to solve. Given a two-dimensional (2D) view of a 3D world, there is no unique way to reconstruct the 3D signal. Formally, such an ill-posed problem has no unique or definitive solution. The same 2D image could represent any of an infinite combination of 3D scenes, even if the data were perfect. However, as already mentioned, the data is corrupted by noise and distortions. Such corruption stems from variations in the world (weather, lighting, reflections, movements), imperfections in the lens and mechanical setup, finite integration time on the sensor (motion blur), electrical noise in the sensor or other electronics, and compression artifacts after image capture. Given these daunting challenges, how can we make any progress?
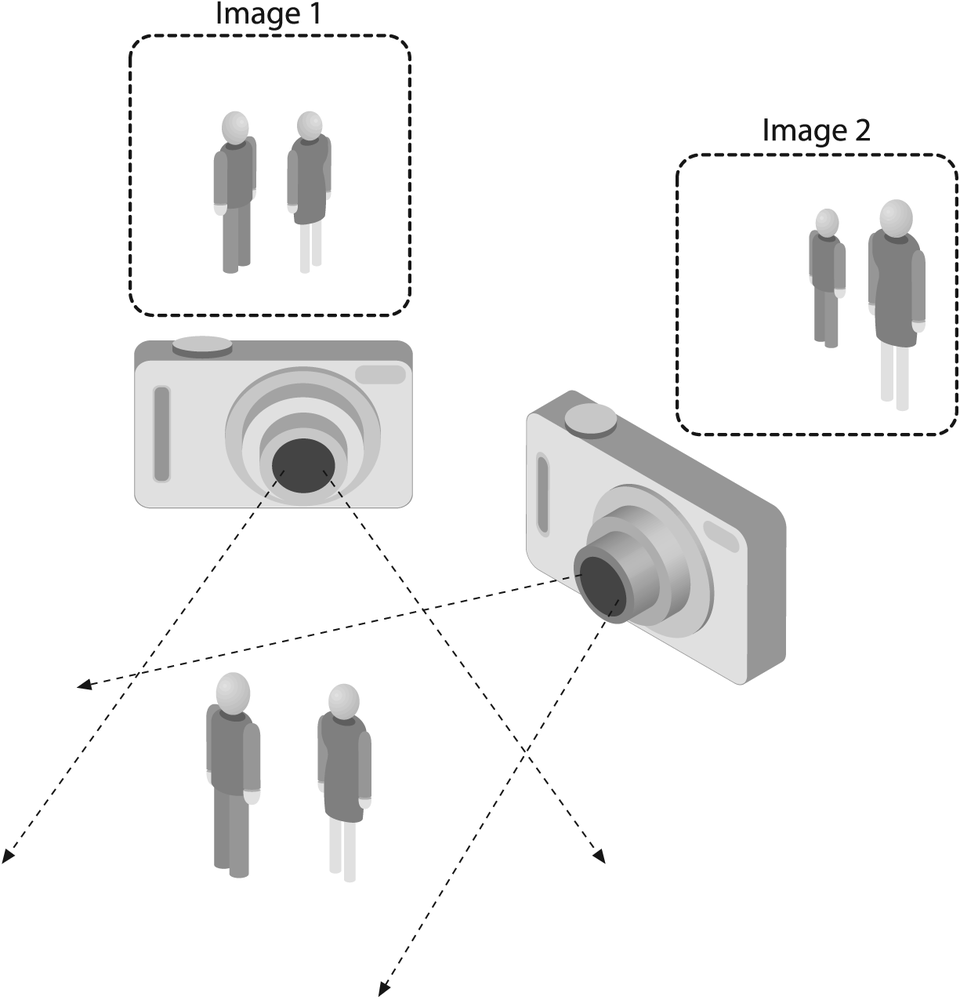
Figure 1-2. The ill-posed nature of vision: the 2D apperarance of objects can change radically with viewpoint
In the design of a practical system, additional contextual knowledge can often be used to work around the limitations imposed on us by visual sensors. Consider the example of a mobile robot that must find and pick up staplers in a building. The robot might use the facts that a desk is an object found inside offices and that staplers are mostly found on desks. This gives an implicit size reference; staplers must be able to fit on desks. It also helps to eliminate falsely "recognizing" staplers in impossible places (e.g., on the ceiling or a window). The robot can safely ignore a 200-foot advertising blimp shaped like a stapler because the blimp lacks the prerequisite wood-grained background of a desk. In contrast, with tasks such as image retrieval, all stapler images in a database may be of real staplers and so large sizes and other unusual configurations may have been implicitly precluded by the assumptions of those who took the photographs. That is, the photographer probably took pictures only of real, normal-sized staplers. People also tend to center objects when taking pictures and tend to put them in characteristic orientations. Thus, there is often quite a bit of unintentional implicit information within photos taken by people.
Contextual information can also be modeled explicitly with machine learning techniques. Hidden variables such as size, orientation to gravity, and so on can then be correlated with their values in a labeled training set. Alternatively, one may attempt to measure hidden bias variables by using additional sensors. The use of a laser range finder to measure depth allows us to accurately measure the size of an object.
The next problem facing computer vision is noise. We typically deal with noise by using statistical methods. For example, it may be impossible to detect an edge in an image merely by comparing a point to its immediate neighbors. But if we look at the statistics over a local region, edge detection becomes much easier. A real edge should appear as a string of such immediate neighbor responses over a local region, each of whose orientation is consistent with its neighbors. It is also possible to compensate for noise by taking statistics over time. Still other techniques account for noise or distortions by building explicit models learned directly from the available data. For example, because lens distortions are well understood, one need only learn the parameters for a simple polynomial model in order to describeâand thus correct almost completelyâsuch distortions.
The actions or decisions that computer vision attempts to make based on camera data are performed in the context of a specific purpose or task. We may want to remove noise or damage from an image so that our security system will issue an alert if someone tries to climb a fence or because we need a monitoring system that counts how many people cross through an area in an amusement park. Vision software for robots that wander through office buildings will employ different strategies than vision software for stationary security cameras because the two systems have significantly different contexts and objectives. As a general rule: the more constrained a computer vision context is, the more we can rely on those constraints to simplify the problem and the more reliable our final solution will be.
OpenCV is aimed at providing the basic tools needed to solve computer vision problems. In some cases, high-level functionalities in the library will be sufficient to solve the more complex problems in computer vision. Even when this is not the case, the basic components in the library are complete enough to enable creation of a complete solution of your own to almost any computer vision problem. In the latter case, there are several tried-and-true methods of using the library; all of them start with solving the problem using as many available library components as possible. Typically, after you've developed this first-draft solution, you can see where the solution has weaknesses and then fix those weaknesses using your own code and cleverness (better known as "solve the problem you actually have, not the one you imagine"). You can then use your draft solution as a benchmark to assess the improvements you have made. From that point, whatever weaknesses remain can be tackled by exploiting the context of the larger system in which your problem solution is embedded.
[2] Computer vision is a vast field. This book will give you a basic grounding in the field, but we also recommend texts by Trucco [Trucco98] for a simple introduction, Forsyth [Forsyth03] as a comprehensive reference, and Hartley [Hartley06] and Faugeras [Faugeras93] for how 3D vision really works.
Get Learning OpenCV now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

