10.2 STATE MODEL OF A FIRST-ORDER SYSTEM
Let us consider the following difference equation:
y(k + 1) + 4y(k) = u(k) (10.2)
where y and u represent the output and input respectively.
Let us start from y (k + 1). We get y (k) using a delay element shown in Fig. 10.2.
Fig. 10.2
In Fig. 10.3, x1(k) represents y(k). From Eq. (10.1) we get
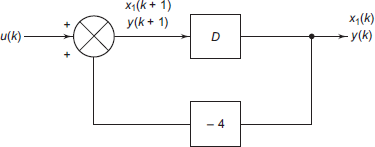
Fig. 10.3
y(k + 1) = u(k) − 4y(k) = −4x1(k) + u(k) (10.3)
Figure 10.3 shows the block diagram of Eq. (10.3).
The state equation and output equation are
y(k + 1) = −4x1(k) + u(k) (10.4) ...
Get Signals and Systems now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

