Chapter 18 Linear Control Basics
In 1998, I developed the eZ-Stunt prototype. This project was an experimental platform built using a standard low-cost model car with an added vertical bar freely articulated on the top (Figure 18.1). Such a system is called an inverted pendulum and it is fundamentally unstable: If you leave the bar, it falls.
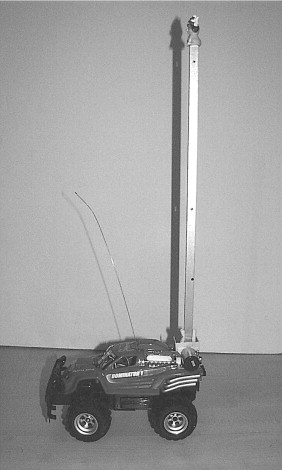
Figure 18.1: Buy a low-cost RC-driven car, replace the radio with an on-board microcontroller, and add an unstable vertical bar. You get the eZ-Stunt, an experimental inverted pendulum platform.
In 1998, I developed the eZ-Stunt prototype. This project was an experimental platform built using a standard ...
Get Robert Lacoste's The Darker Side now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

