A basic turn for the robot
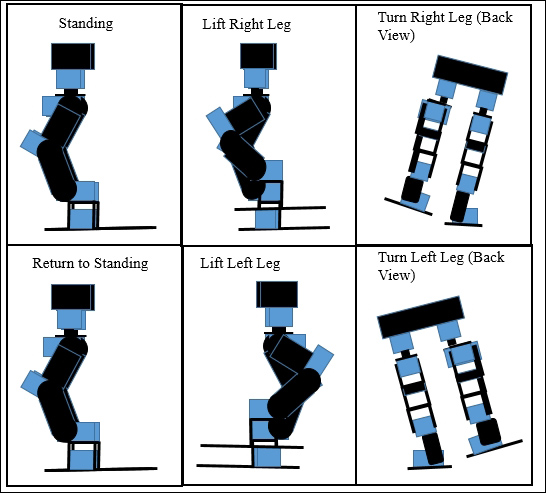
Your robot can walk forward, but you'll also want your robot to be able to turn. Your turning is limited to the amount you can turn the hip of your robot, which is around 20 degrees for this robot. So, to perform a full 90 degree turn, you'll need to take the turn in several steps. The big difference here is that when you return to the standing state, you do not want to reset your hip rotation servos to 90 degrees. Here are the diagrams, including several that are rear view, for a turn:
Here is the Python code for a basic turning operation:
And here is the Python code to chain these basic states together to step a turn: ...
Get Raspberry Pi: Amazing Projects from Scratch now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

