Line-following robot architecture
Our architecture for a line-following robot will have a specific set of features, which are:
- Wireless remote access to the robot
- Text-driven interface for remote control using Python
- Buttons on the robot to start/stop and shutdown the robot processing
- A single PiCam camera sensor
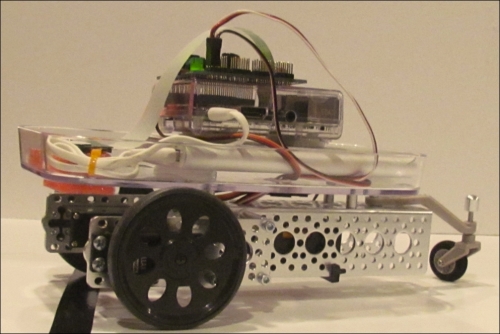
- Two-wheel drive with a dragging tail
We will provide you with a downloadable-parts list for this model, but, you could just as easily implement it as either a tracked or four-wheel skid-steer robot. The following image is our line-following robot:
Software architecture
We will develop our robot based on a multi-module approach. This strategy will ...
Get Raspberry Pi Essentials now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

