To control the servos used for the Pi-Bug robot, we require a special control signal that will determine the angle that the servo is required to move to. We will send the servo a PWM signal, where the duration of the on time will allow us to control the angle of the servo arm (and thereby, allow us to control the Pi-Bug robot's legs). The following diagram shows how a PWM signal can be used to control the angle of the servo:
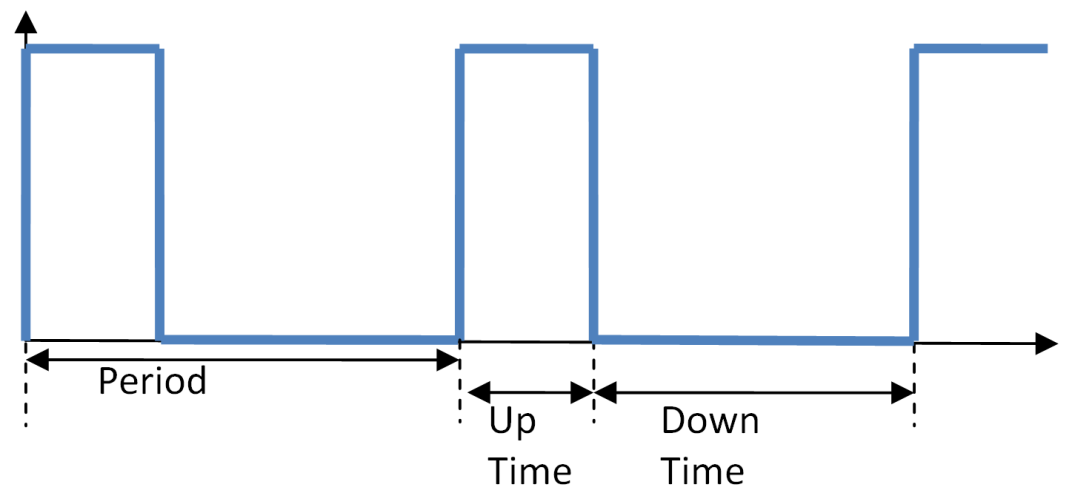
The angle of the servo is controlled by the duration of the up time of the PWM signal
Most servos will have an angular range of approximately 180 degrees and a mid-position of 90 degrees. A PWM frequency ...

