7.9. COMPENSATION AND DESIGN USING THE ROOT-LOCUS METHOD
The root-locus technique has been developed previously in Sections 6.14–6.16, and digital computer programs for obtaining the root locus were presented in Section 6.17 (MATLAB) and 6.18. It is a very helpful tool that the control engineer can use in order to study the variation of gain, system parameters, and effect of compensation. We demonstrated in Section 6.14 the migration of poles in the complex plane as the gain of the system was varied from zero to infinity. We obtained the root locus for several feedback systems including the following:
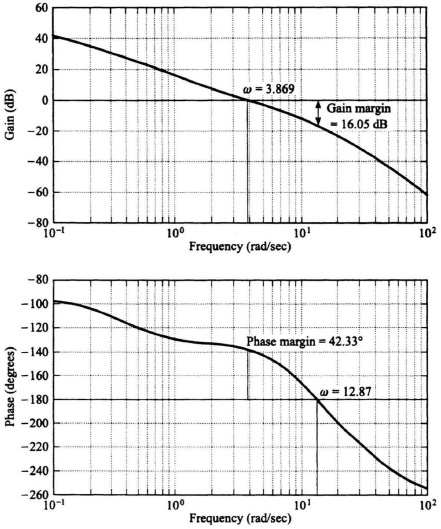
Figure 7.36 Bode diagram for the compensated system of Figure 6.49, where
![]()
![]()
This was illustrated in Figure 6.60. An analysis of the root locus for this system indicated that it was always unstable, because at least one of the roots of the characteristic equation always occurred in the right-half-plane. This section demonstrates how this system may be compensated by means of a phase-lead network, and/or rate feedback in parallel with position feedback. This problem is followed by considering phase-lag-network compensation for the system illustrated in Figure 6.57. In addition, we shall ...
Get Modern Control System Theory and Design, 2nd Edition now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

