4.7. ILLUSTRATIVE PROBLEMS AND SOLUTIONS
This section provides a set of illustrative problems and their solutions to supplement the material presented in Chapter 4.
I4.1 A control sysem whose two closed-loop poles and one closed-loop zero are located in the s-plane is illustrated:
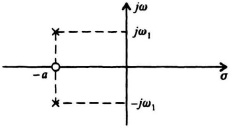
Figure I4.1
(a) Determine the closed-loop transfer function in its simplest form.
(b) Determine the impulse response of this system using the table of Laplace transforms in Appendix A.
SOLUTION: (a) ![]()
(b) Since R(s) = 1, then
![]()
From Appendix A, we obtain the following inverse Laplace transform of this equation:
c(t) = (Ke−at cos(ω1t))U(t).
I4.2 A control-system engineer is trying to reduce costs in his development project to produce a positioning system using a two-phase ac servomotor. The engineer finds a discarded two-phase ac servomotor on a shelf in the parts room, and wants to know its characteristics so that he can determine its usefulness for the project. It is decided to observe the response of this motor in a unity-gain feedback loop to a unit step input as illustrated:
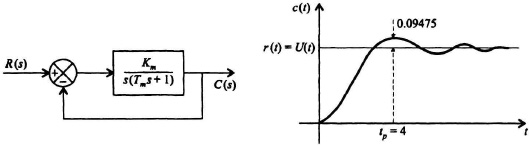
Figure I4.2
From ...
Get Modern Control System Theory and Design, 2nd Edition now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

