Appendix K
The Unscented Kalman Filter (UKF)
The unscented Kalman filter (UKF) is based on the “unscented transformation” (UT). First proposed by Julier et al. [1] the UT allows for the estimation of the mean and the covariance of an arbitrary analytical transformation y = f(![]() ) of a random Gaussian vector
) of a random Gaussian vector ![]() with a mean value
with a mean value ![]() and a covariance matrix
and a covariance matrix ![]() .
.
If L denotes the size of the vector ![]() , the method put forth by Julier et al. runs in three steps:
, the method put forth by Julier et al. runs in three steps:
1) 2L+1 particles or σ-points [1] are generated as follows:
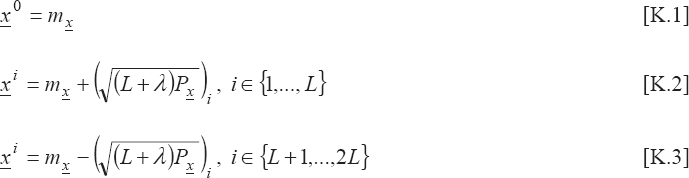
where (M)i is the iith row or column of matrix M and λ = α2(L + κ)– L is a scaling factor. Element α is a parameter which allows us to control the dispersion of the σ-points around the mean ![]() . κ is a secondary scaling factor.
. κ is a secondary scaling factor.
2) The σ-points are transformed using function f:
3) The mean and ...
Get Modeling, Estimation and Optimal Filtration in Signal Processing now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

