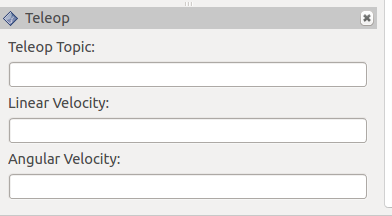
In this chapter, we design a teleoperation commander in which we can manually enter the teleoperation topic, linear velocity, and angular velocity, as shown in the following screenshot:
The following is a detailed procedure on how to build this plugin.

