As already stated, RoboWare Studio allows developers to manage ROS projects directly from its user interface without using the Linux terminal or editing the CMakeLists.txt file. In this section, we will discuss how to create and handle ROS packages in RoboWare.
To create a complete ROS package with CPP executables, follow these steps:
- Let's create the package. Right-click on the src folder of the ROS workspace from the explorer window and select Add ROS Package. Type the name for the package. A new ROS package will be created. In our case, we are creating a package called roboware_package:
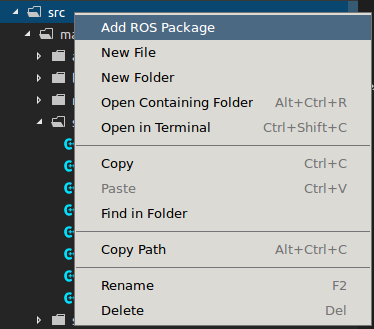
Figure 3: ...

