In this section, we will discuss some of the common issues and debugging techniques in this interface.
If the trajectory is not executing on Gazebo, first list the topics:
$ rostopic list
If the Gazebo controllers are started properly, we will get the following joint trajectory topics in the list:
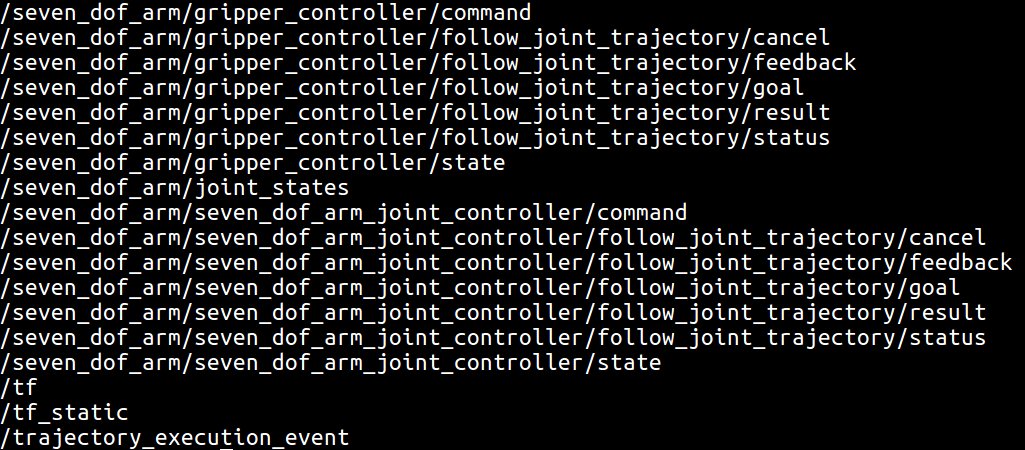
Figure 17: Topics from the Gazebo-ROS trajectory controllers
We can see follow_joint_trajectory for the gripper and the arm group. If the controllers are not ready, the trajectory will not execute in Gazebo.
Also, check the terminal message while starting the launch file:
Figure 18: The Terminal ...

