After building the package using catkin_make, we can run the node using the following command:
- Launch the webcam driver:
$ roslaunch usb_cam usb_cam-test.launch
- Run the cv_bridge sample node:
$ rosrun cv_bridge_tutorial_pkg sample_cv_bridge_node
- If everything works fine, we will get two windows, as shown in the following image. The first window shows the raw image and the second is the processed edge-detected-image:
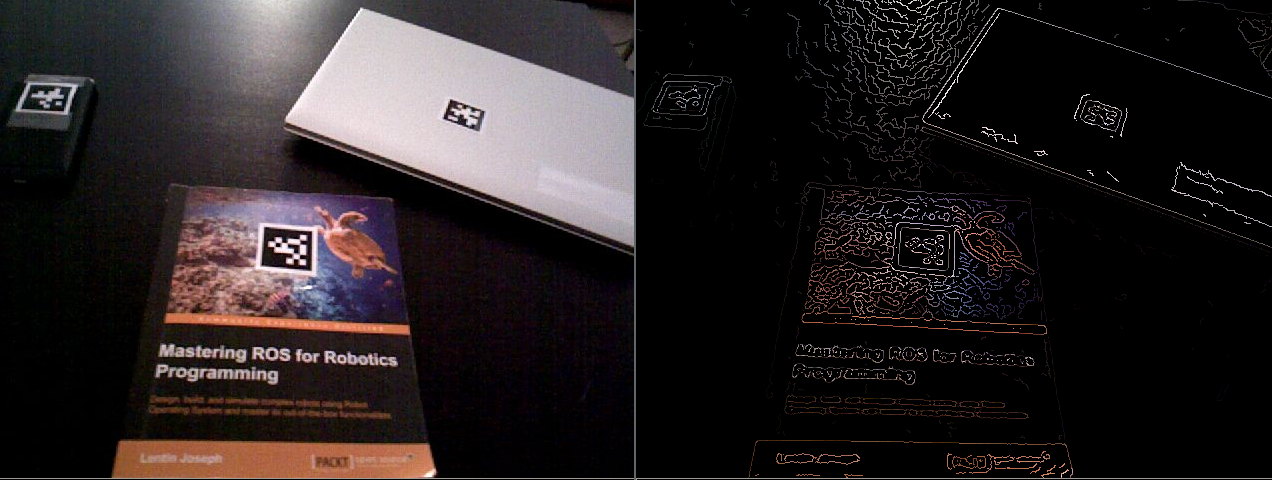
Figure 6: Raw image and edge-detected-image

