In this step, we name the robot end effector and assign the end-effector group, the parent link, and the parent group.
We can add any number of end effectors to this robot. In our case, it's a gripper designed for pick and place operations.
Click on the Add End Effector button and name the end effector as robot_eef, the planning group as gripper, which we have already created, the parent link as grasping_frame, and the parent group as arm:
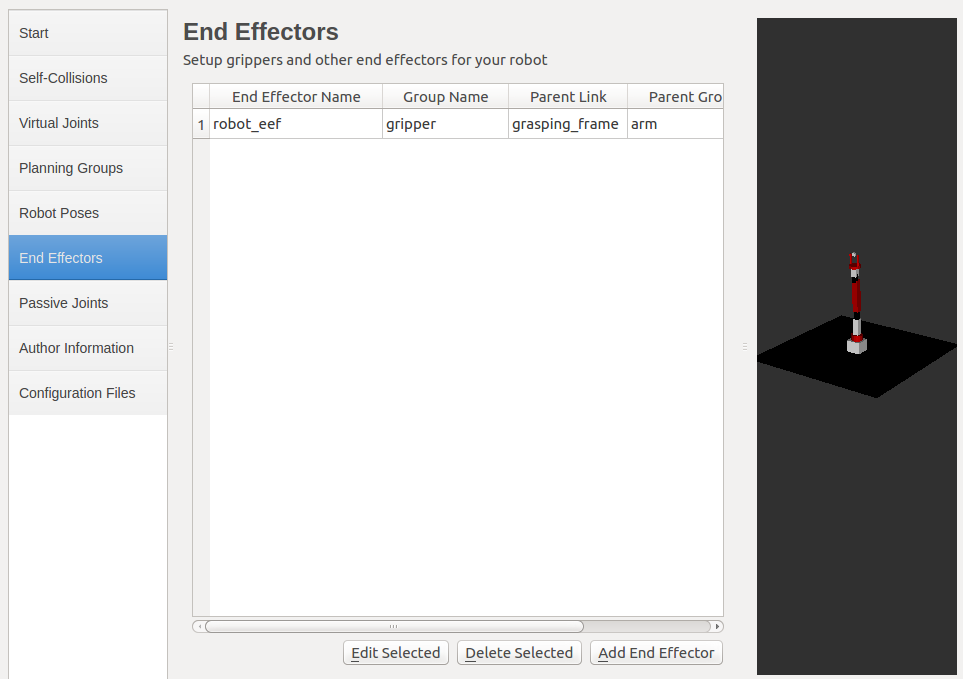
Figure 9: Adding end effectors

