You can run ROS nodes by using both the roslaunch and rosrun commands.
First of all, we should create a launch file for our package. To do this, right-click on the package name and select Add Launch Folder to create a folder named launch. Then, right-click on the launch folder and select Add Launch File to add a new file. After we have filled the launch file, we can simply right-click on the launch file's name and select Run Launch File:
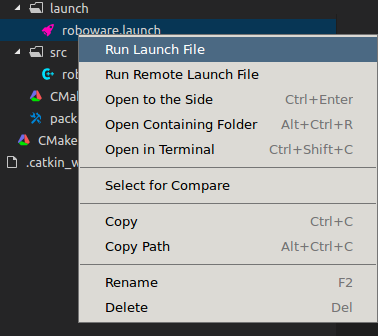
Figure 9: Running the roslaunch command from RoboWare Studio
To execute an ROS node using the rosrun command, we must select the desired executable from the node list. ...

