The 2D Nav Goal button is used to give a goal position to the move_base node in the ROS Navigation stack through RViz. We can select this button from the top panel of RViz and can give the goal position inside the map by left clicking the map using the mouse. The goal position will send to the move_base node for moving the robot to that location:
- Topic: move_base_simple/goal
- Topic type: geometry_msgs/PoseStamped
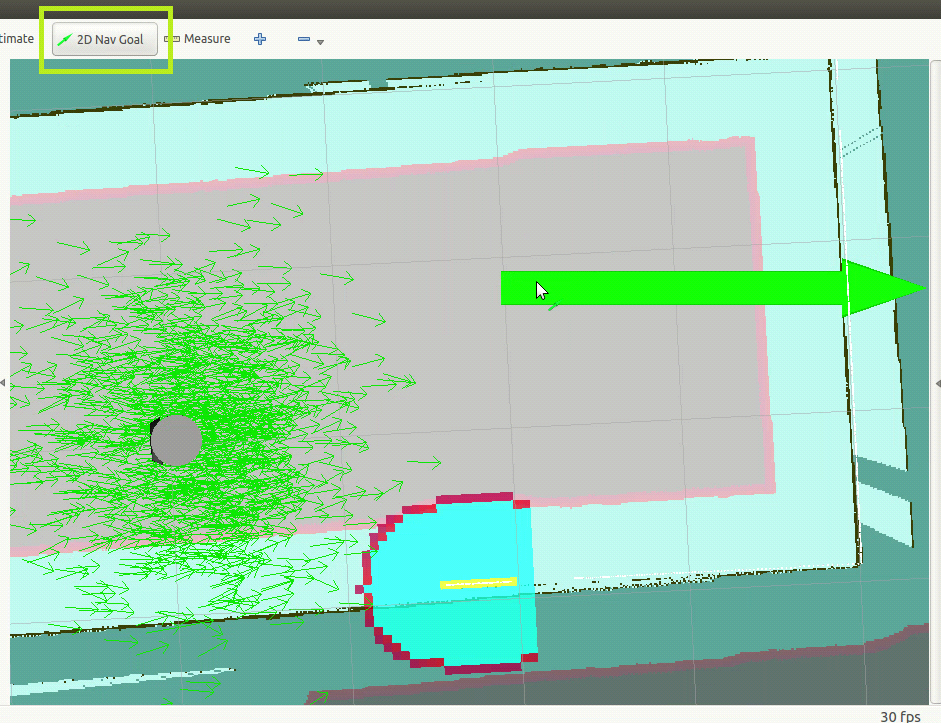
Figure 14: Setting the robot's goal position in RViz using 2D Nav Goal

