To view the ROS topics, nodes, and services active in your system at a certain time, click on the ROS icon on the left-hand sidebar. The list of the information traveling along the roscore is shown in each box, and we can display the contents of each ROS message by clicking on the topic name:
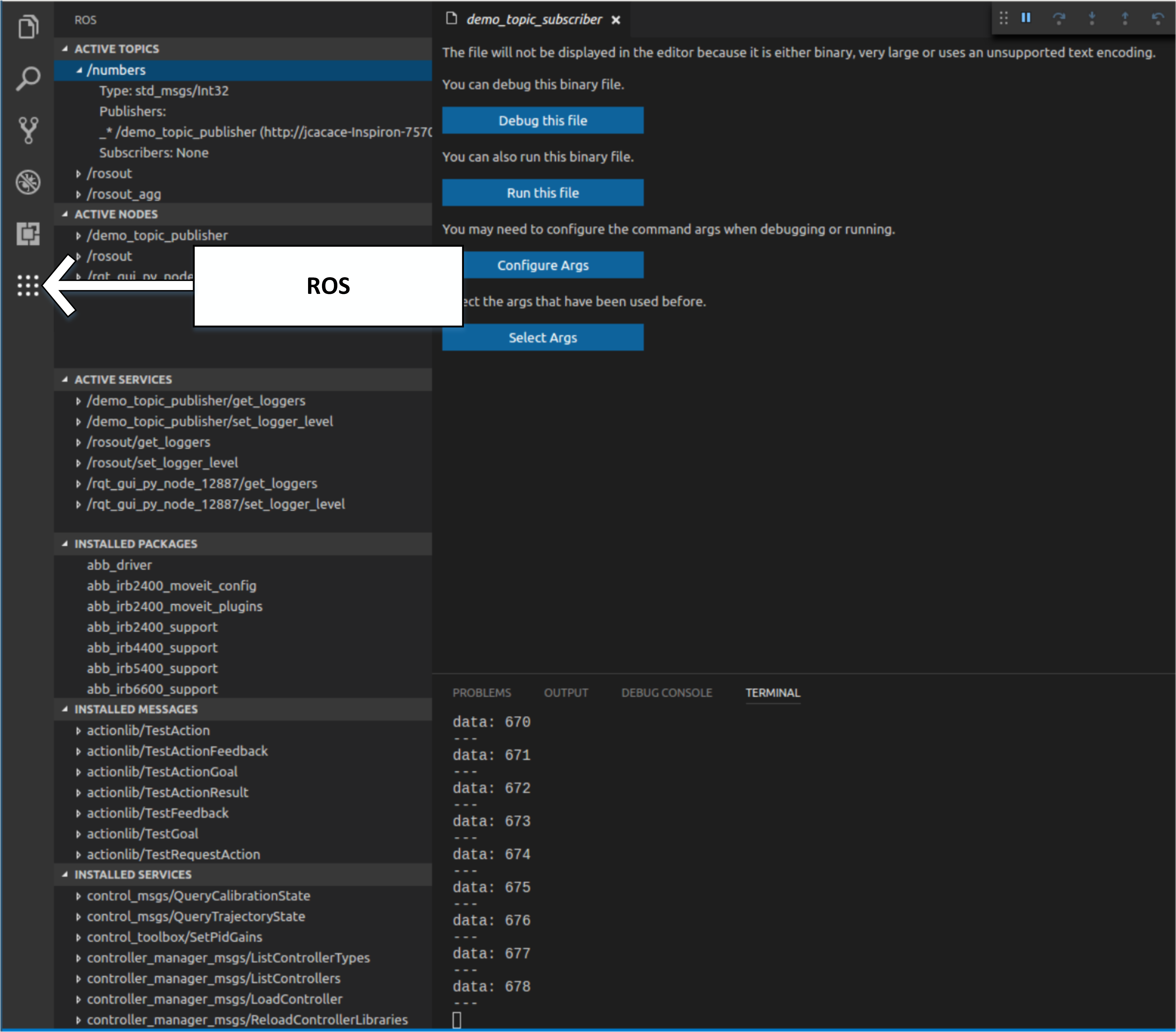
Figure 13: ROS panel in RoboWare Studio
In the example shown in the previous figure, we have chosen to display data published on the topic /numbers of type std_msgs::Int32.
We can even record and play ROS bagfiles from RoboWare. To start recording a bagfile, click on the Record ROS Topic button near the ...

