We can check the issues inside an ROS package by simply going into the package and entering roswtf. We can also check for issues in our ROS system by entering the following command:
$ roswtf
This command generates a report about the health of the system—for example, in the case of a wrong ROS hostname and master configuration, we will have the following report:
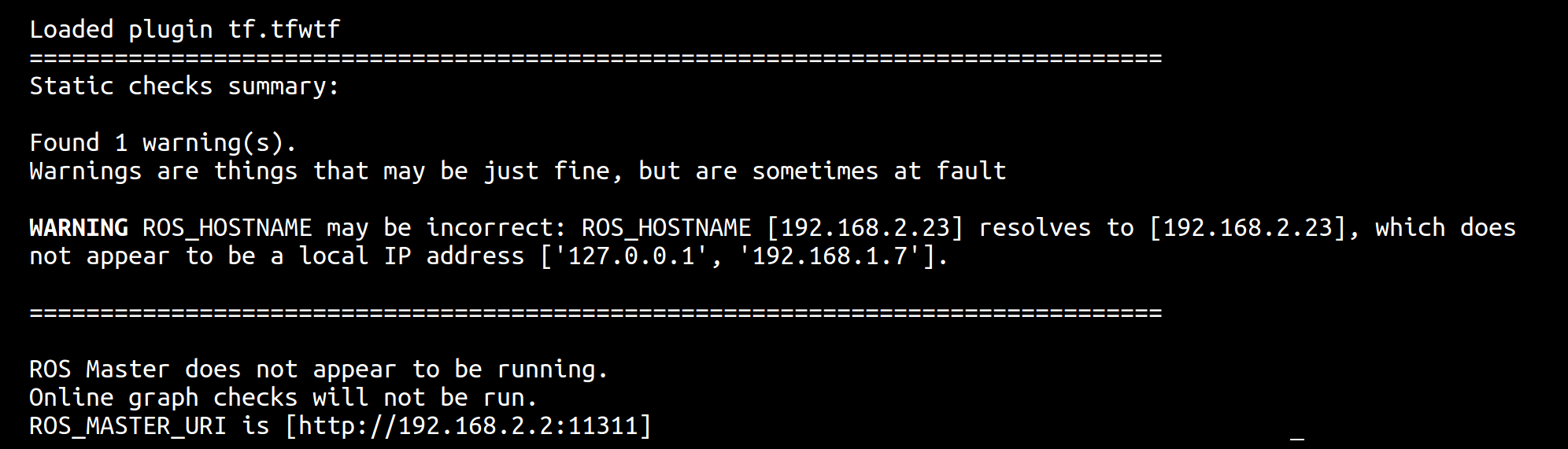
Figure 17: roswtf output in the case of a wrong ROS hostname configuration
We can also run roswtf on launch files to search for potential issues:
$ roswtf <file_name>.launch
The wiki page of roswtf is available at http://wiki.ros.org/roswtf.
The following are some of the ...

