Working with MoveIt! configuration of ABB robots
We will work with the motion planning of the popular ABB industrial robot models such as IRB 2400 and IRB 6640. The following are the images of these two robots and their specifications.
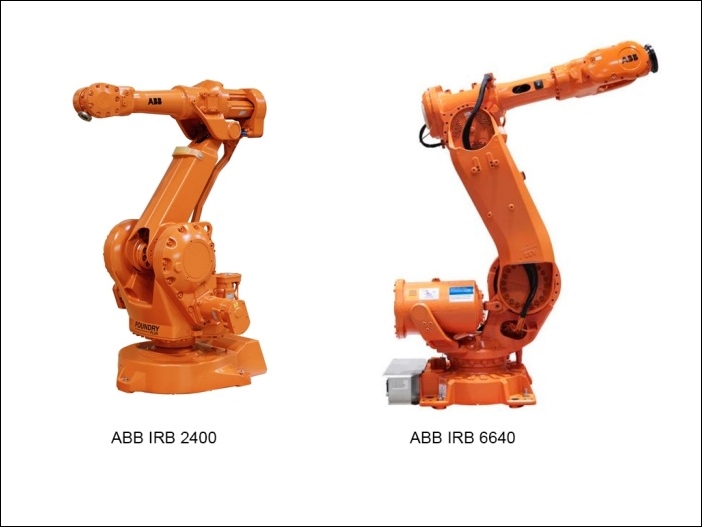
Figure 11: ABB IRB 2400 and IRB 6640
The arm specification of the IRB 2400-10 and 6640-130 models are given in the following table:
|
Robot |
IRB 2400-10 |
IRB 6640-130 |
|---|---|---|
|
Working radius |
1.55 m |
3.2 m |
|
Payload |
12 kg |
130 kg |
|
Weight |
380 kg |
1310-1405 kg |
|
Footprint |
723x600 mm |
1107 x 720 mm |
To work with ABB packages, clone the ROS packages of the robot into the catkin workspace. We can use the following command ...
Get Mastering ROS for Robotics Programming now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

