The third sensor that we will be using is a MaxSonar EZ1 Ultrasonic range finder. This sensor is one of my favorite sensors to use. I have used it in almost every autonomous robot that I have built to determine the distance to nearby objects. The following is an image of the EZ1 Ultrasonic range finder:
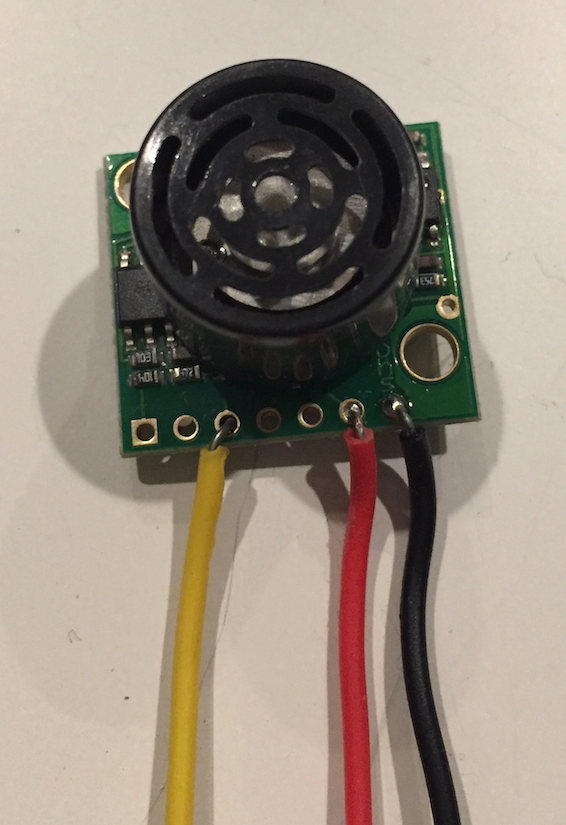
For the example, in this chapter, we will be using pins 3,6, and 7 on the sensor. Pin 3 is used for analog out, pin 6 is for VCC and pin 7 is for ground. Pins 4 and 5 are for serial RX/TX connection and pin 2 is for a pulse-width output, however, we will not be using those outputs in the example for this chapter.
An ...

