Rodrigues Transform
When dealing with three-dimensional spaces, one most often represents rotations in that space by 3-by-3 matrices. This representation is usually the most convenient because multiplication of a vector by this matrix is equivalent to rotating the vector in some way. The downside is that it can be difficult to intuit just what 3-by-3 matrix goes with what rotation. An alternate and somewhat easier-to-visualize [187] representation for a rotation is in the form of a vector about which the rotation operates together with a single angle. In this case it is standard practice to use only a single vector whose direction encodes the direction of the axis to be rotated around and to use the size of the vector to encode the amount of rotation in a counterclockwise direction. This is easily done because the direction can be equally well represented by a vector of any magnitude; hence we can choose the magnitude of our vector to be equal to the magnitude of the rotation. The relationship between these two representations, the matrix and the vector, is captured by the Rodrigues transform. [188] Let r be the three-dimensional vector r = [rx ry rz]; this vector implicitly defines θ, the magnitude of the rotation by the length (or magnitude) of r. We can then convert from this axis-magnitude representation to a rotation matrix R as follows:
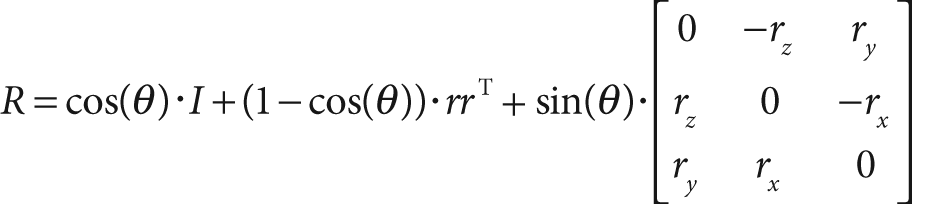
We can also go from a rotation matrix ...
Get Learning OpenCV now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

