Proportional algorithm
In the next set of program, we create a loop called Slow Down. Inside this loop, readings from the Ultrasonic or Infrared proximity sensor block are sent to a Math block (to take the negative of the position values so that the robot moves forward) and then sent to the power input of a Move Steering block. We can have the loop end when it reaches our desired stopping distance as shown in the following screenshot:
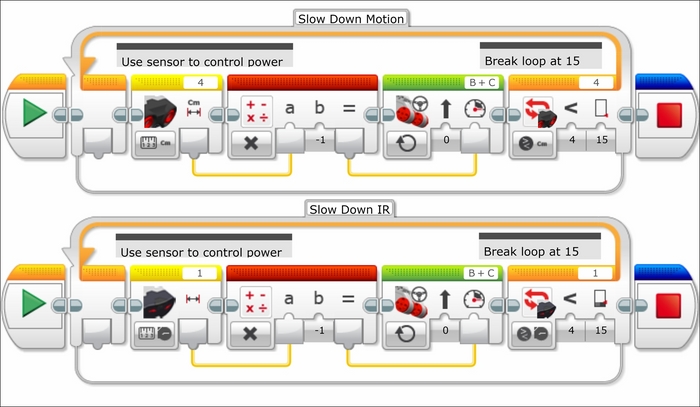
Instead of using the exact values of the output of the sensor block, we can use the difference between the actual position and the desired position to control the Move Steering block, as shown in the following screenshot. ...
Get Learning LEGO MINDSTORMS EV3 now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

