A
Aircraft Rigid Body Modes
A.1 RIGID BODY TRANSLATION MODES
The aircraft heave motion may often be represented by a free–free rigid body heave mode (subscript h), instead of using the heave displacement of the centre of mass as a physical coordinate. The mode shape is normalized to have a unit downwards displacement at all points on the aircraft as shown in Figure A.1(a). Thus the mode shape is κh(x, y) = 1 and the corresponding generalized coordinate is qh. The heave mode modal mass mh = m (i.e. aircraft mass) is found by equating the kinetic energy expressed in terms of the physical and modal masses/coordinates, so
![]()
The other two translational rigid body modes are similar, namely the sideslip and fore-and-aft modes.
A.2 RIGID BODY ROTATION MODES
The pitch, roll and yaw motions may also be represented by rigid body modes of rotation rather than via the pitch, roll and yaw angles. The rigid body pitch mode shape involves a nose up rotation about the aircraft centre of mass, as shown in Figure A.1(b), and if the mode shape is normalized as κp(x, y) = −x (i.e. 1 radian rotation) then the pitch generalized coordinate qp will be equal to the pitch angle. The pitch mode modal mass mp = Iy (i.e. the aircraft pitch moment of inertia) may also be found by equating kinetic energies
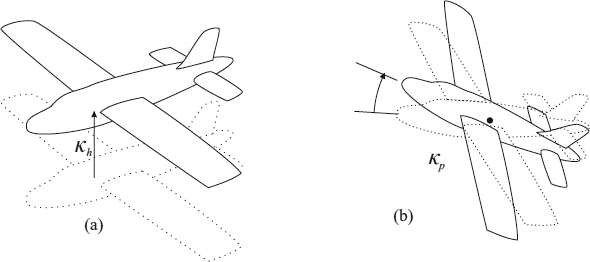
Figure ...
Get Introduction to Aircraft Aeroelasticity and Loads now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

