Creating a launch file
To launch everything, we are going to create a launch file, chapter8_laserscan.launch:
<launch> <node pkg="hokuyo_node" type="hokuyo_node" name="hokuyo_node"/> <node pkg="rviz" type="rviz" name="rviz" args="-d $(find chapter8_tutorials)/config/laser.rviz"/> <node pkg="chapter8_tutorials" type="c8_laserscan" name="c8_laserscan" /> </launch>
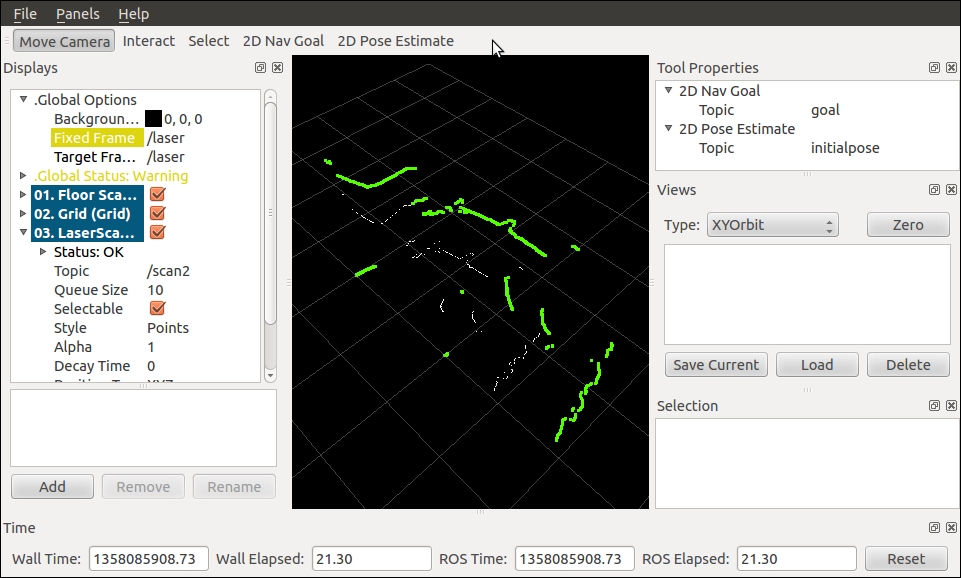
Now, if you launch the chapter8_laserscan.launch file, three nodes will start: hokuyo_node, rviz, and c8_laserscan. You will see the RViz visualizer screen with the two-laser contour. The green contour is the new data, as shown in the following screenshot:
Get Effective Robotics Programming with ROS - Third Edition now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

