Dealing with the unexpected
ROS has several tools for detecting potential problems in all the elements of a given package. Just move with roscd to the package you want to analyze. Then, run roswtf. For chapter3_tutorials, we have the following output. Note that if you have something running, the ROS graph will be analyzed too. We have run the roslaunch chapter3_tutorials example6.launch command, which yields an output similar to the following screenshot:
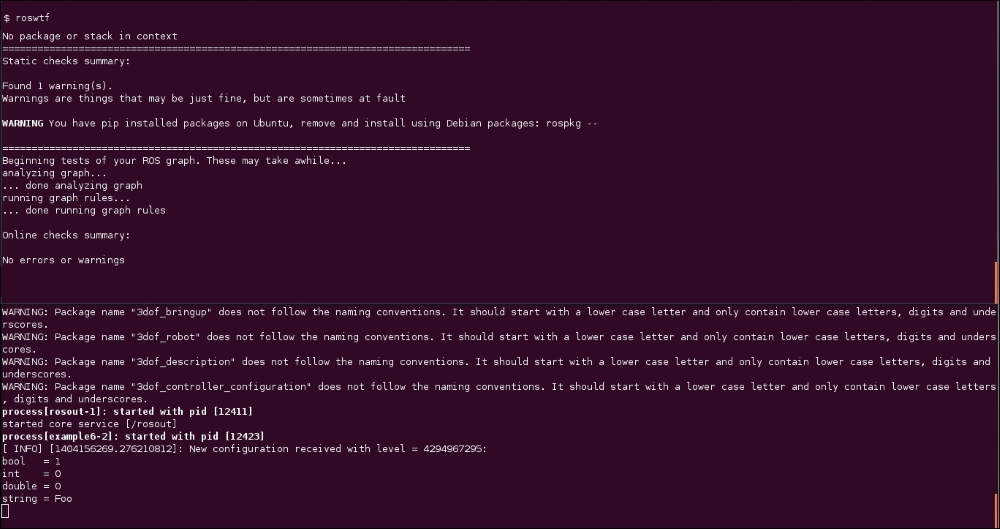
In general, we should expect no error or warning, but even then some of them are innocuous. In the previous screenshot, we can see that roswtf does not detect any error; it only issues a warning ...
Get Effective Robotics Programming with ROS - Third Edition now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

