Appendix B
We are going to arrive at this result starting from the definition ![]() and by using the expression of the function K already obtained.
and by using the expression of the function K already obtained.
NOTE.– Different from the calculation developed in section 7.3.6 we will not show that ![]() obtained is minimal.
obtained is minimal.
Another way of showing the following result:
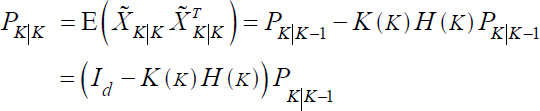
Demonstration
Starting from the definition of the covariance matrix of the filtering error, i.e.:
![]()
It becomes with ![]() and
and ![]()
So 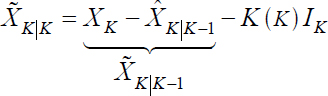
Let us now use these results to calculate ![]()

We observe that:
![]()
but Ij ⊥ IK and ...
Get Discrete Stochastic Processes and Optimal Filtering now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

