Appendix A
Resolution of Riccati's equation
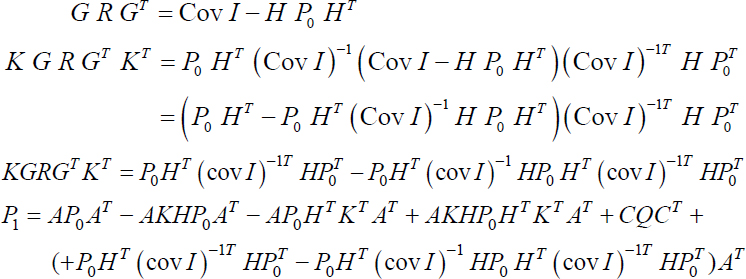
Let us show that: ![]()
Let us take again the developed expression of the covariance matrix of the prediction error of section 7.3.6

with:
![]()
and:
![]()
By replacing K(K) and Cov IK, by their expressions, in the recursive writing of, ![]() , we are going to be able to simplify the expression of the covariance matrix of the prediction error.
, we are going to be able to simplify the expression of the covariance matrix of the prediction error.
To lighten the expression, we are going to eliminate the index K when there is no ambiguity by noting ![]() ,
, ![]() and I = IK
and I = IK

Thus:
i.e. in replacing K with its expression.
The 3rd and 6th term cancel each other out and the 4th and 7th term ...
Get Discrete Stochastic Processes and Optimal Filtering now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

