Appendix D
State-Space Eigenvector Calculation
The third and fourth coordinates of the state-space eigenvector of IPM-SM, was calculated in section 3.3.2.1.
We now have to calculate the first two coordinates of the state-space equation system:
(D.1) ![]()
This system is calculated in section 3.2.5 (cf. equation (3.57)).
The state-space eigenvectors (cf. equation (3.76)) will be calculated from coefficients of the inverse of the matrix P (Appendix C):
(D.2) 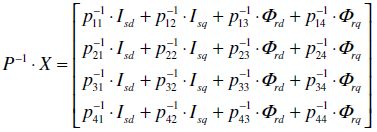
The input matrix of state-space equations was calculated (cf. equation (3.72)) in section 3.3.2:
(D.3) 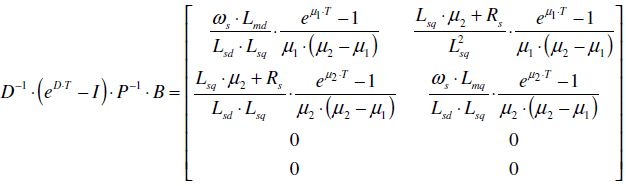
as well as the exponential function of the diagonal matrix D, multiplied by the sampling period T (cf. equation (3.69)):
(D.4) 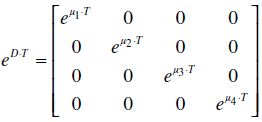
Let us calculate the first coordinate of the state-space vector (D.2) in equation (D.1), written in the (d0, q0) reference frame:
(D.5) 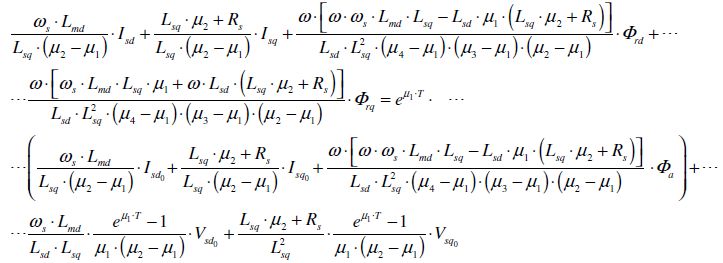
For the second coordinate, we obtain, in the same way:
(D.6) 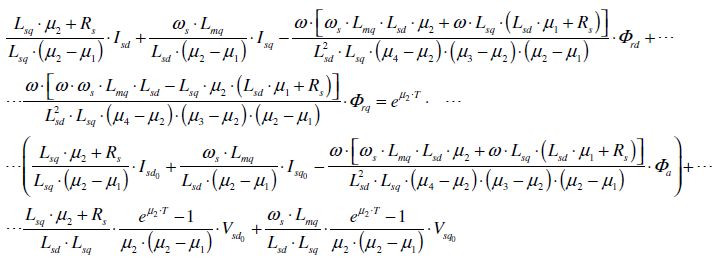
For the current ...
Get Direct Eigen Control for Induction Machines and Synchronous Motors now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

