The tank uses two EV3 infrared (IR) sensors to measure information about the beacon's position:
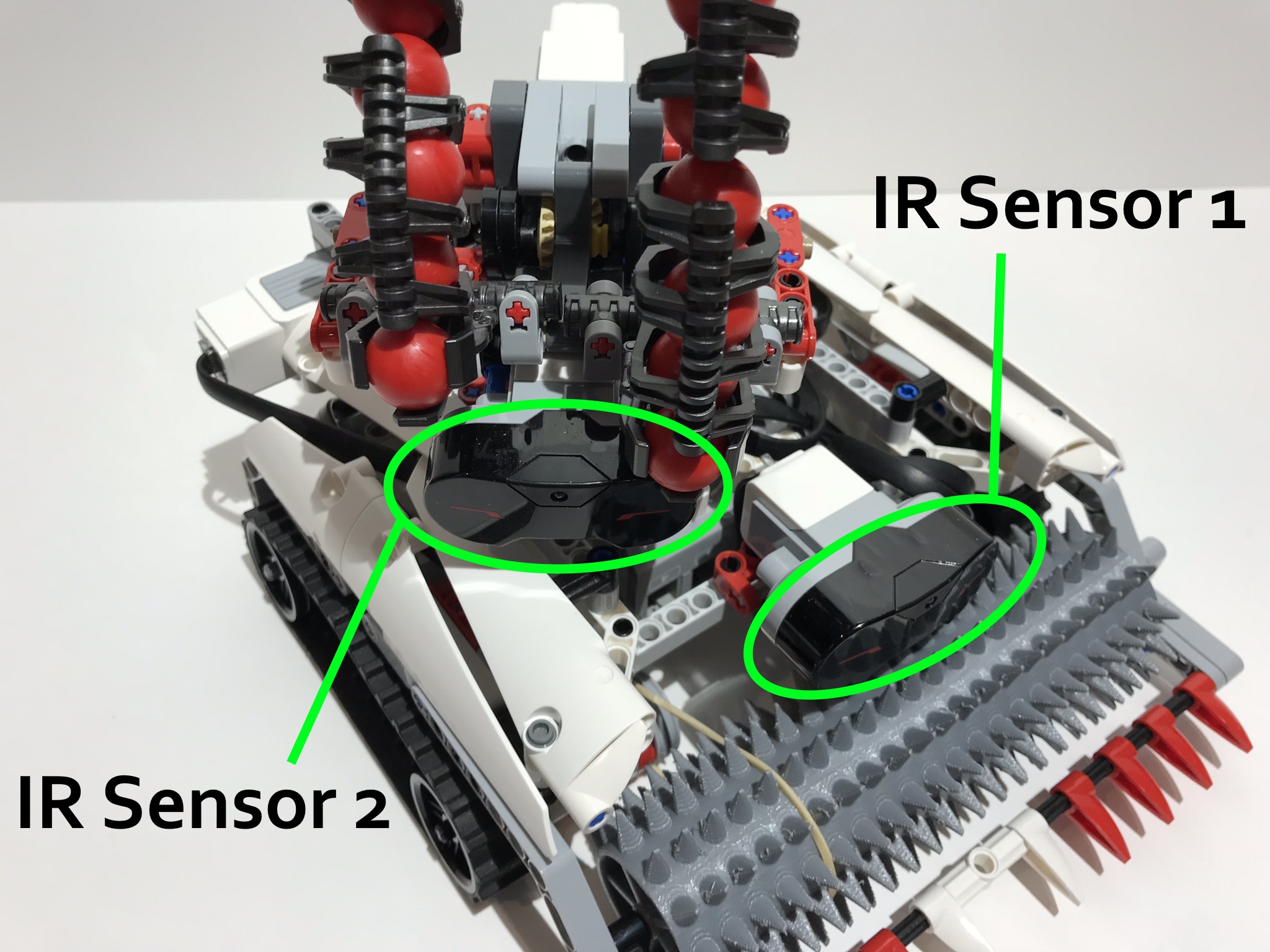
The first IR sensor is fixed to the tank's chassis and is plugged into sensor port 1. This sensor measures the beacon's heading and distance and adjusts the speed and steering of the tank's driving.
The second IR sensor is plugged into port 2. This sensor is mounted to the turret; it rotates along with the turret and follows the beacon. This sensor also measures the beacon's heading, but, instead of controlling the tank's steering, it controls the angle of the turret.
In the next section, you will learn more about each senor's specific ...

