Follow these steps to connect the camera to the ArduPilot:
- Take the pitch servo's signal pin and connect it to the 11th pin of the ArduPilot (A11) and the roll signal to the 10th pin (A10). Make sure you connect only the signal (S pin) cable of the servos to the pin, not the other two pins (ground and the VCC).
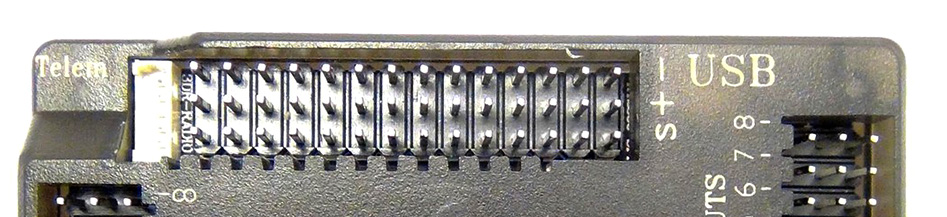
- The signal cables must be connected to the innermost pins of the A11 and A10 pins (two pins make a raw; see the following picture for clarification):
My suggestion is adding an extra battery for your gimbal's servos. If you want to connect your servo directly to the ArduPilot, your ArduPilot will not perform well, as the ...

