To connect the motors, you need to place the motor on the frame arm and attach the screws, as shown in the following figure, making sure you tighten the screws as much as you can, without breaking the frame arm:
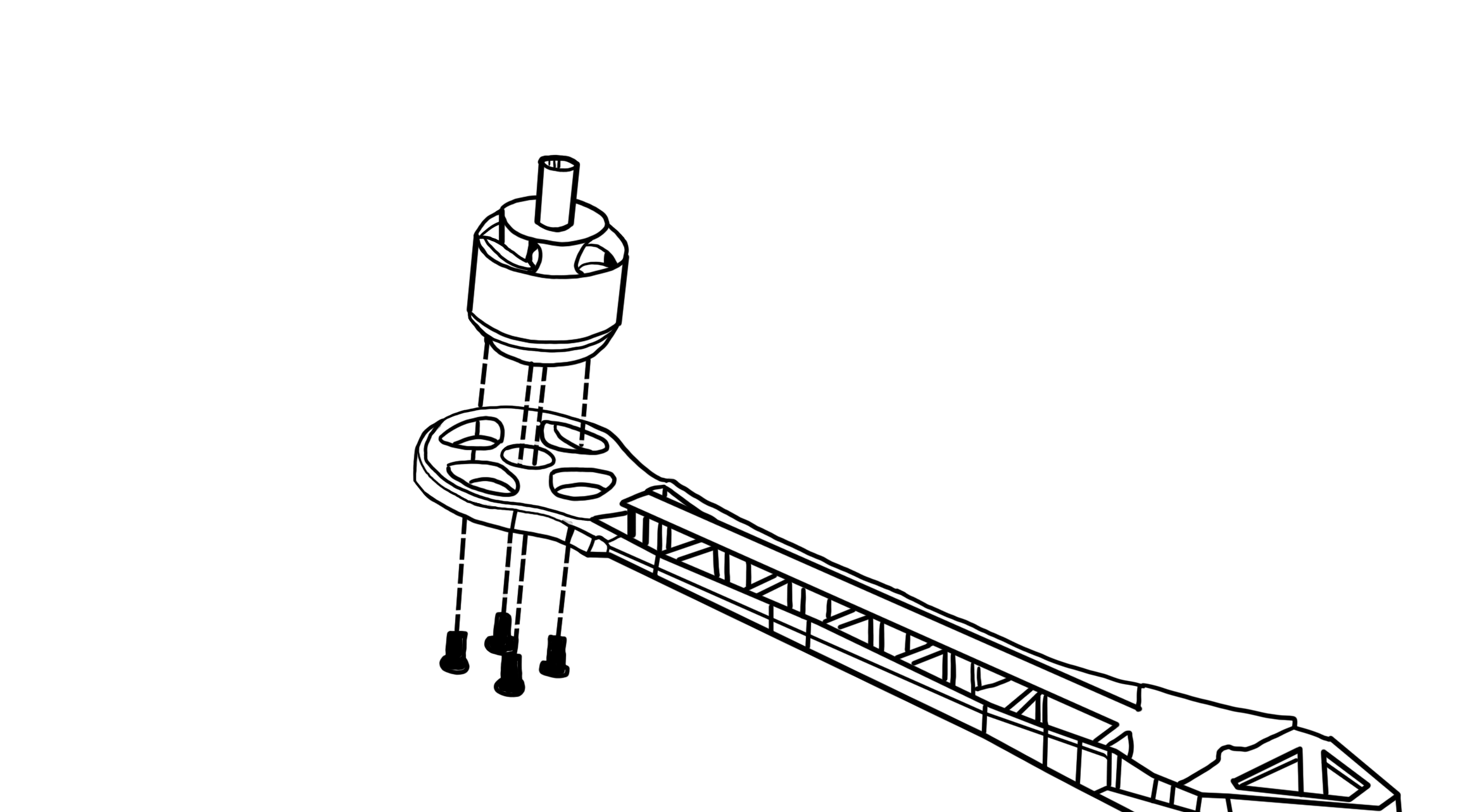
The BLDC has three wires coming out of the motor. We need to solder the bullet connector to them to be connected to the ESC. Now, connect the other three motors to the frame arms.

