22
Planning
22.1 STRIPS Planning Systems
22.1.1 Describing States and Goals
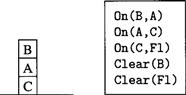
An appealing way to attack the frame problem involves blending our state-space and situation-calculus approaches. This blend involves imagining that the predicate-calculus formulas describing a set of world states are themselves a kind of “state”—much as I did in Chapter 7 when I discussed feature-based state spaces. In the blocks world, for example, the world states in which block B is on top of block A on top of block C on the floor (as in Figure 22.1) are described by
Get Artificial Intelligence now with the O’Reilly learning platform.
O’Reilly members experience books, live events, courses curated by job role, and more from O’Reilly and nearly 200 top publishers.

